新的步进电机控制器/驱动器简化步进电机系统设计
流控制器监测并控制绕组电流强度。这种结构让设计人员能够在宽转速范围内保持所需的转矩,而且电源电压波动很校这种设计非常适合全步和半步驱动器,而且也易于实现。很多设计人员避免在微步进驱动器中使用电压控制方式,因为电源电压变化导致峰流有很大变化,而且,随着转速提高,电机的反电动势(EMF )也会增强。不过,利用数字控制技术可以修正这些不利因素。
为实现这种电压控制式驱动电路,需要利用一个PWM计数器/定时器电路来控制输出脉宽,以数字方式设置输出占空比。L6470通过在电机绕组上施加电压来控制相电流。虽然不能直接控制相电流的幅度,但是,相电流与相电压的大小、负载、转矩、电机电学特性和转速密切相关。有效输出电压与电机电源电压和KVAL系数的积成正比。KVAL的取值范围是电源电压的0%到100%。在微步进驱动器中,这个最大值再乘以调制指数,可产生所选步数的正弦波。峰值电压由下面的公式得出:
VOUT = VS ⋅KVAL
KVAL值由下面的公式得出:
KVAL = (Ipk x R)/Vs
其中:
Ipk = 所需的峰流
Vs = 典型电源电压
R = 电机绕组电阻
该器件的寄存器支持加速度、减速度、恒速运转和保持位置等不同的 KVAL设置,在运动曲线每个部分轻松实现不同的转矩设置。
BEMF补偿
如果在整个转速范围内始终向电机供给相同的峰值电压,随着电机转速增加,电流强度会逐渐降低,因为电机的反电动势BEMF会显著降低施加到线圈上的电压。图4左边的波形描述了没有采用BEMF补偿技术的电机工作状况。从图中不难看出,随着电机转速增加,BEM以线性方式提高,因为线圈上的电压是实际施加的相电压与BEMF电压的差值,所以电流将会降低。
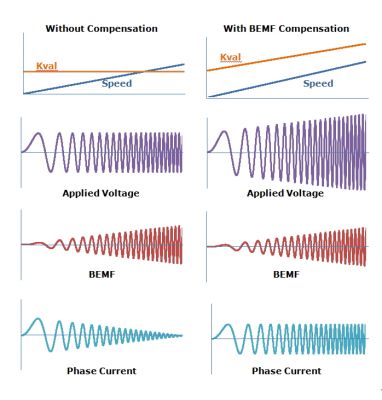
图 4:有BEMF补偿电路和无BEMF补偿电路的相电流
为修正BEMF增加对电流的影响,该产品在KVAL系数中增加一个修正BEMF的因数。本质上,就是在 KVAL初始设置值中增加一个修正值,以抵消BEMF的影响。由于BEMF直接与转速成正比,因此这个修正值因数是一个斜率,根据这个斜率和电流转速来计算实时修正值。该产品提供不同的修正值:第一个值是一个标准值,适用于电机从零转速开始加速运转,直到相交转速参数INT_SPEED设置的最高速度为止。在相交速度之上,可以用两个附加的斜率调整标准斜率,一个用于恒速运转和加速度,另一个则用于减速运转。当 BEMF修正值设置适当时,峰值电流在电机全程转速范围内保持恒定,如图4所示。图6描述了当一个电机加速运转时的实际电流波形。
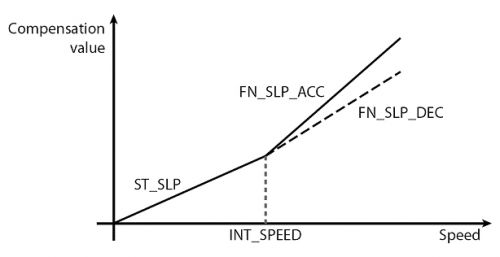
图5: BEMF修正曲线
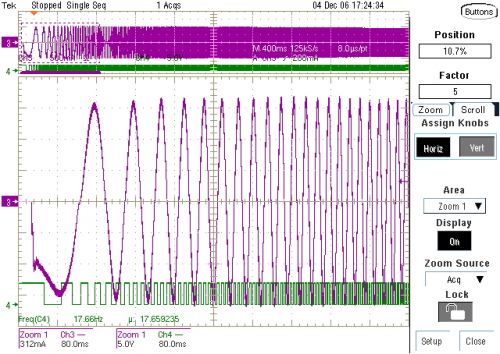
图 6:有BEMF修正功能的相电流
电源和相电阻修正
电机的电源电压和相电阻是另外两个影响相电流的主要因素。因为控制器采用电压控制方式,对输出占空比进行控制,所以这两个要素之中任何一个发生变化,都会影响相电流。
当电机没有稳压电源时,在从电源到电机驱动电路的电压上会出现大量的脉动电压。随着电源电压变化,电机电流也会波动。如果电源上的脉动电压很大,当电机电流变得太小时,电机很可能会停止运转。该控制器内置一个电源电压修正电路,如图7所示。在这个电路内,内部模数转换器负责测定电源电压,然后由在数字内核实现的修正算法计算修正因数,将其施加到PWM占空比内,使输出电压值在整个电源电压变化范围内保持恒定。

图 7:电源修正
随着电机发热,相阻变化也会直接影响相电流。KTHERM设置用于修正电机内部发热导致的相阻变化。驱动器控制器的软件可以监测或估计电机温度的升高状况,设置KTHERM值,修正因为温度升高而引起的电机相阻的变化。例如,可以使用一个简单的算法测定在运转间隔时电机停止运转时的相阻,根据测量结果调整KTHERM值。
结论
L6470实现的功能让设计人员可以实现电压控制式微步进驱动器,修正过去需要采用电流控制式驱动器才能解决的典型的系统问题。从总体上看,系统控制变得更加顺畅,没有电流控制式驱动器的常见限制性问题。使用数字化电压控制式PWM方法,可以轻松实现每步最多128微步进 的微步进驱动器。电压控制式解决方案的正弦波曲线更加精确,位置解析率高于电流控制式方法,电压控制式操作可大幅降低系统谐振。此外,该器件实现的数字运动引擎能够大幅降低系统微控制器的负荷,在多电机应用环境中,无需另设一个专用微控制器。
- 意法半导体安全解决方案强化防盗版功能(11-01)
- 基于Cortex-M3的 STM32微控制器处理先进电机控制方法(11-23)
- 电容感应式触摸按键方案在电磁炉中的应用 (01-17)
- STM32F030探索套件开发日志70篇,从入门到开发助力你的低成本设计!(01-08)
- 智能化STM32 F7微控制器如何满足嵌入式系统更高处理性能需求(10-03)
- LUCT低不确定性时钟树设计方法、算法和工具(10-17)