基于FPGA平台构建汽车辅助驾驶系统算法
System Generator FPGA综合结果
开发人员在开发辅助驾驶系统时必须以适合大规模生产的成本水平进行设计。
达到一定处理性能所需的裸片资源将决定他们所需的FPGA器件的尺寸,进而决定其成本。
在实施车道偏离警告预处理器过程中,以XA Spartan-3A DSP 3400为目标。采用这种方法,并利用该模型来支持未来规划中的开发活动。但是,对预处理功能所占用资源的分析表明,该设计适合小得多的器件。
表1给出了XA Spartan-3A DSP 3400器件上GNR块的资源占用情况。计算时,假定在VGA分辨率下灰度输入图像的帧速率为30Hz(即输入数据速率为 9.2MS/s)。
从定时性能角度,GNR 设计以168.32 MHz 的时钟频率运行,可接受数据传输速率高达 18.72 MS/s的输入数据。 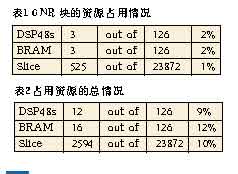
整个车道检测预处理子系统所需资源总情况如表2所示。
相应的定时性能分析表明,时钟频率为128.24MHz,最高输入数据传输速率为14.2MS/s。
根据上述所需资源情况分析,预处理功能甚至可用于XA Spartan-3E 500,其密度大约为XA Spartan-3A 3400A器件的1/7。 
图4 LDW处理模型输出
结果
图4给出了一个LDW系统的性能图样,包括用于车道线备用物提取的基于 FPGA的图像预处理功能。可以看到,右边两个图片中的输入帧。左边的一对图像显示的是我们在FPGA中实施的预处理功能的性能。左上角的图片显示的则是阈值化后边缘检测函数的幅值。左下角图片是在边缘细化和车道线模式搜索处理后拍摄的。很明显,LDW预处理器能非常有效地摄取道路图景,并能将数据减少至基本车道线选取物。右上角和右下角图片中的黄线和红线分别表示对基于简单直线道路模型的车道标线的瞬间跟踪计算结果。
- 一种基于FPGA的接口电路设计(11-18)
- 利用Virtex-5 FPGA实现更高性能的方法(03-08)
- 设计性能:物理综合与优化(04-28)
- 使用 PlanAhead Design 工具提高设计性能(04-28)
- 采用灵活的汽车FPGA 提高片上系统级集成和降低物料成本(04-28)
- 面向 FPGA 的 ESL 工具(04-29)