(七)速度、转向的PID控制
时间:10-02
整理:3721RD
点击:
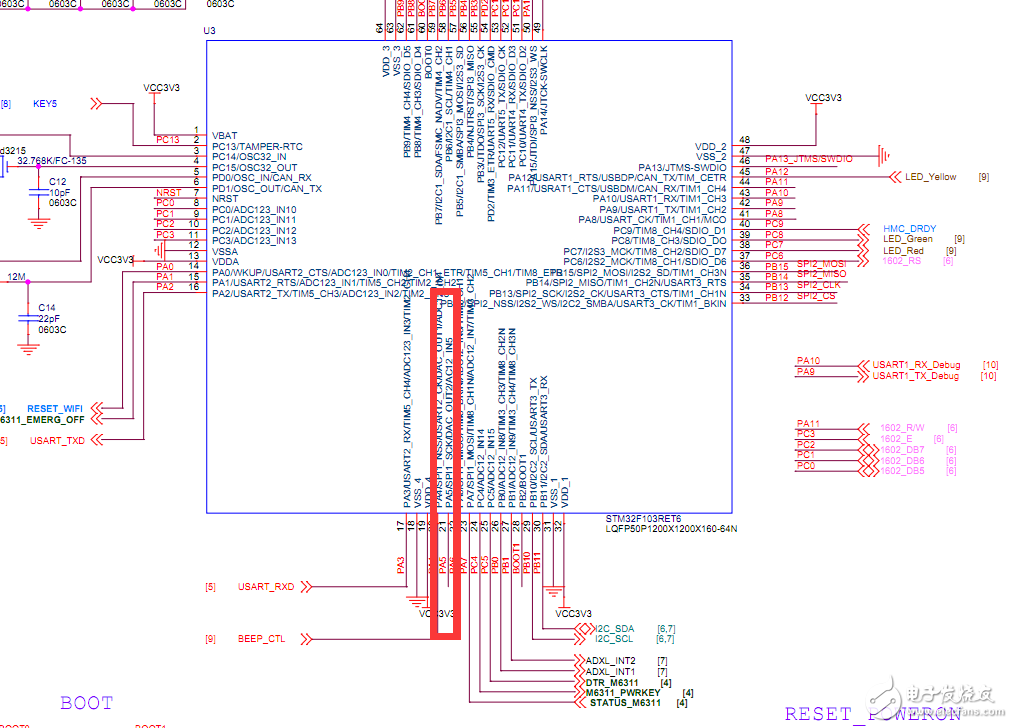
PID控制里面的参数I是误差积分相关的系数,积分时间设置为 5ms,由MPU6050的INT中断引脚产生。查看原理图之后,决定使用GPIOA,PIN5这个引脚。
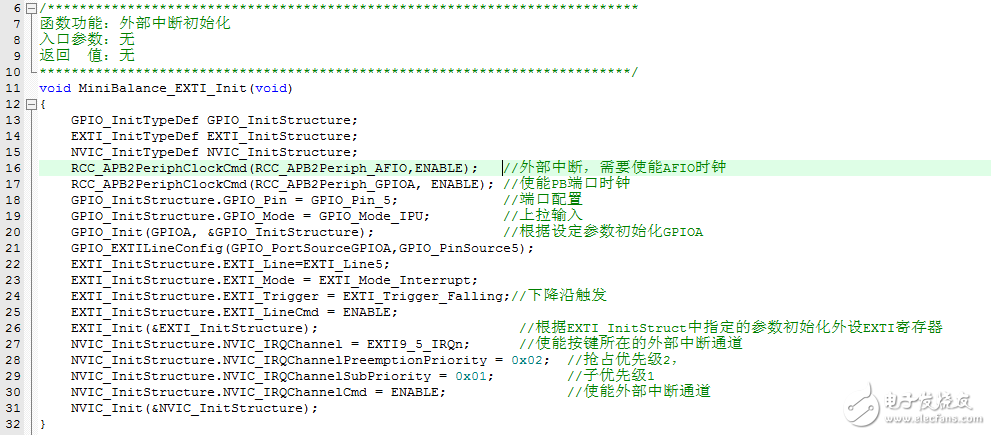
初始化GPIOA第5脚为外部中断输入引脚
中断服务程序里只做PID计算和控制输出
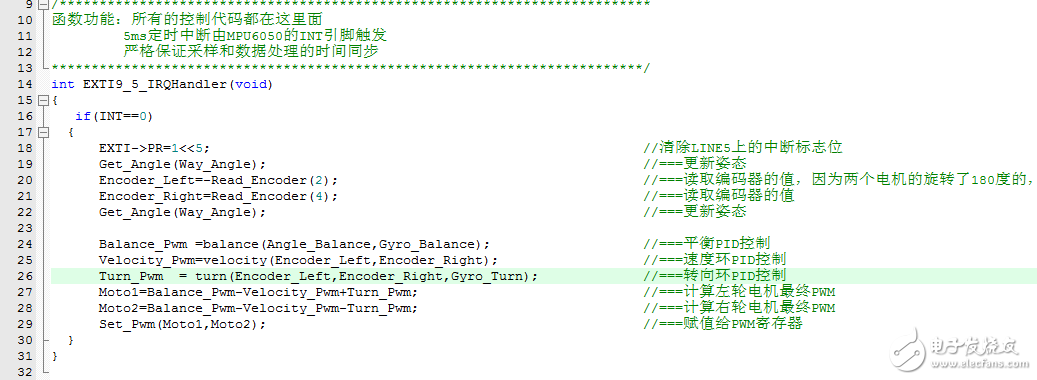
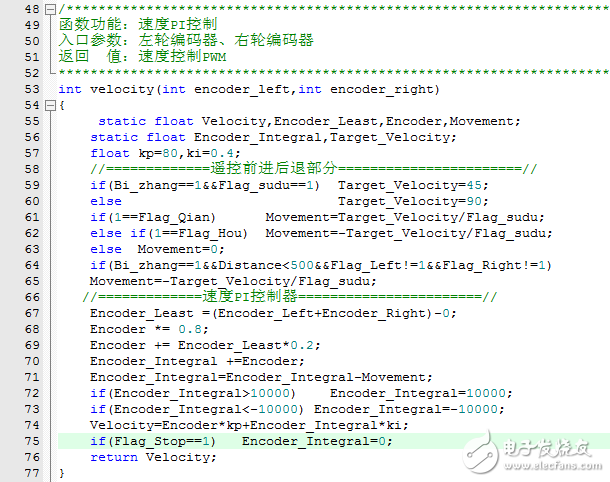
PID控制的C语言程序,可以写成 位置式PID或者增量式PID
把PID计算结果赋值给PWM的CCR寄存器,以改变PWM的占空比
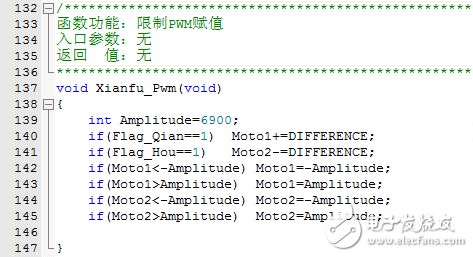
初始化GPIOA第5脚为外部中断输入引脚
中断服务程序里只做PID计算和控制输出
PID控制的C语言程序,可以写成 位置式PID或者增量式PID
把PID计算结果赋值给PWM的CCR寄存器,以改变PWM的占空比
写的非常不错,