FreeRTOS移植试验
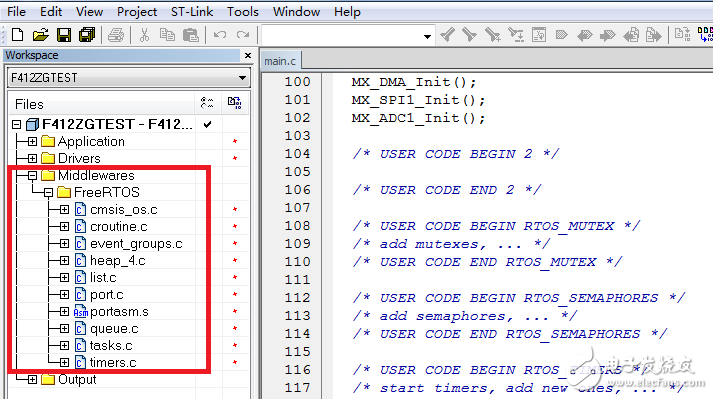
在开发实际应用系统时,我们经常需要考虑数据的实时性和多任务,嵌入式实时操作系统的出现为实现这一目的提供了很好的助力。FreeRTOS是近年来比较流行的嵌入式实时操作系统,而且是开源免费的,STM32CubeMX对它也提供了支持。我们可以使用STM32CubeMX很方便的添加上FreeRTOS,只需要在配置界面找到“MiddleWares”并将其下的FreeRTOS选为“Enable”就可添加上FreeRTOS:

配置完成后,更新源码就会在软件中添加上FreeRTOS的相关文件,各文件的功能网上已经有很多介绍,就不啰嗦了,而且也不属于我们需要说明的内容。
添加完了之后,源码中就会添加创建一个缺省任务的代码。因为最少要有一个任务才有意义。查看main()函数,就会出现如下这样一段代码:
/* Createthe thread(s) */
/*definition and creation of defaultTask */
osThreadDef(defaultTask, StartDefaultTask, osPriorityNormal, 0, 128);
defaultTaskHandle= osThreadCreate(osThread(defaultTask), NULL);
/* USERCODE BEGIN RTOS_THREADS */
/* addthreads, ... */
/* USERCODE END RTOS_THREADS */
/* USERCODE BEGIN RTOS_QUEUES */
/* addqueues, ... */
/* USERCODE END RTOS_QUEUES */
/* Startscheduler */
osKernelStart();
其实这段代码就实现两个功能:创建任务和情动任务调度。不过ST在FreeRTOS的基础上做了进一步的封装。其中osKernelStart()函数用于启动任务调度,这个函数比较简单只不过是调用了一下FreeRTOS中的任务调度函数vTaskStartScheduler(),其实现原型如下:
osStatus osKernelStart (void)
{
vTaskStartScheduler();
returnosOK;
}
而实现任务创建的就是osThreadDef(defaultTask,StartDefaultTask, osPriorityNormal, 0, 128);和defaultTaskHandle =osThreadCreate(osThread(defaultTask), NULL);这两行代码。这两行代码就是创建了一个任务显示名称为defaultTask的StartDefaultTask任务。带是代码看起来有点不容易理解,其实是ST进行了进一步封装的结果。
首先osThreadDef(defaultTask,StartDefaultTask, osPriorityNormal, 0, 128)其实是一个宏,其定义的原型如下:
#define osThreadDef(name, thread, priority,instances, stacksz) \
const osThreadDef_t os_thread_def_##name = \
{ #name, (thread), (priority), (instances),(stacksz) }
那么osThreadDef_t又是个什么呢?其实是ST定义的创建任务的参数结构体:
typedef struct os_thread_def {
char *name; ///< Thread name
os_pthread pthread; ///< startaddress of thread function
osPriority tpriority; ///< initialthread priority
uint32_t instances; ///< maximumnumber of instances of that thread function
uint32_t stacksize; ///< stack sizerequirements in bytes; 0 is default stack size
} osThreadDef_t;
所以第一句的含义就很明确了,就是定义了一个osThreadDef_t类型的变量用于存储用于创建任务的参数。第二句很明显是一个函数调用,但参数与我们见到的FreeRTOS中的创建任务的函数有些不同。其实它的第一个参数osThread(defaultTask)也是一宏:
#define osThread(name) \
&os_thread_def_##name
其实就是调用第一句中定义的osThreadDef_t类型的结构体变量。这样就明确了,第二句实际上就是调用FreeRTOS中的任务创建函数创建任务:
osThreadId osThreadCreate (const osThreadDef_t*thread_def, void *argument)
{
TaskHandle_t handle;
if(xTaskCreate((TaskFunction_t)thread_def->pthread,(const portCHAR*)thread_def->name,
thread_def->stacksize, argument,makeFreeRtosPriority(thread_def->tpriority),
&handle) != pdPASS) {
returnNULL;
}
returnhandle;
}
所以我们要创建其他的任务,只需照此设计即可。当然任务中的内容根据需要修改,STM32CubeMX添加的缺省任务,参数和实现内容也可以更改。在这里我们不对缺省任务做太多修改,在其任务函数中添加部分我们的内容。
考虑到我们所应用到的功能,我们需要6个任务,利用上缺省任务我们还需要添加5个任务。之所以要添加这么多的任务是因为我们不想让各种功能相互影响。在某一外设出现操作错误时不会影响其他部分的应用,这也是我们使用多任务实时操作系统的原因之一。
缺省任务我们让它来跑逻辑控制。再增加几个任务分别来跑各种功能,由于AD和DA都是通过SPI1通讯来完成的,所以采用同一个任务。
首先定义几个任务操作句柄:
/*定义任务句柄*/
osThreadId defaultTaskHandle;
osThreadId addaTaskHandle;
osThreadId ndirTaskHandle;
osThreadId lcdTaskHandle;
osThreadId ethernetTaskHandle;
osThreadId paraTaskHandle;
在声明对应的任务处理函数:
/*声明任务处理函数*/
void StartDefaultTask(void const * argument);
void ADDATask(void const * argument);
void NDIRTask(void const * argument);
void LCDTask(void const * argument);
void EthernetTask(void const * argument);
void ParameterTask(void const * argument);
编写各任务处理函数,由于各种功能在之前已经实现了所以任务函数比较简单:
/* 缺省任务,用来处理逻辑控制 */
void StartDefaultTask(void const * argument)
{
for(;;)
{
/*逻辑处理*/
LogicOperation();
osDelay(1);
}
}
/* AD/DC数据处理任务函数 */
void ADDATask(void const * argument)
{
for(;;)
{
/*获取AD采集的测量值*/
GetMeasuredValue();
/*设置模拟量输出*/
SetOutputValue();
osDelay(1);
}
}
/* 远红外炭氢检测数据处理任务函数 */
void NDIRTask(void const * argument)
{
for(;;)
{
/*获取CH4测量值*/
GetNDIRData();
osDelay(1);
}
}
/* LCD显示通讯处理任务函数 */
void LCDTask(void const * argument)
{
for(;;)
{
/*显示屏数据通讯*/
LCD_DataExchange();
osDelay(1);
}
}
/* 以太网通讯处理任务函数 */
void EthernetTask(void const * argument)
{
for(;;)
{
/*以太网通讯处理*/
EthernetProcess();
osDelay(1);
}
}
/* 参数存取处理任务函数 */
void ParameterTask(void const * argument)
{
for(;;)
{
/*参数的存储、恢复等处理*/
ParameterProcess();
osDelay(1);
}
}
再在系统中创建任务:
/* Create the thread(s) */
/*definition and creation of defaultTask */
osThreadDef(defaultTask, StartDefaultTask, osPriorityNormal, 0, 128);
defaultTaskHandle = osThreadCreate(osThread(defaultTask), NULL);
/* USERCODE BEGIN RTOS_THREADS */
osThreadDef(addaTask, ADDATask, osPriorityNormal, 0, 128);
addaTaskHandle = osThreadCreate(osThread(addaTask), NULL);
osThreadDef(ndirTask, NDIRTask, osPriorityNormal, 0, 128);
ndirTaskHandle = osThreadCreate(osThread(ndirTask), NULL);
osThreadDef(lcdTask, LCDTask, osPriorityNormal, 0, 128);
lcdTaskHandle = osThreadCreate(osThread(lcdTask), NULL);
osThreadDef(ethernetTask, EthernetTask, osPriorityNormal, 0, 128);
ethernetTaskHandle = osThreadCreate(osThread(ethernetTask), NULL);
osThreadDef(paraTask, ParameterTask, osPriorityNormal, 0, 128);
paraTaskHandle = osThreadCreate(osThread(paraTask), NULL);
/* USERCODE END RTOS_THREADS */
至此在系统中添加FreeRTOS的过程完成,编译调试看看结果:

编译无错误,运行正常。通过IO中断看看运行结果与没有操作系统时有没有区别:

在运行一段时间后再看看结果:
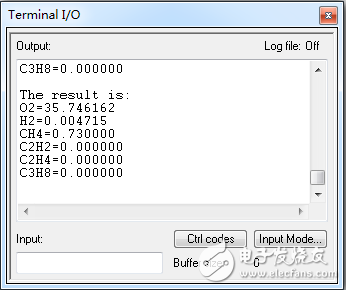
系统运行无误,与我们所希望的一样。
6666