四轴飞行器的设计之四元数与滤波算法——STC15单片机实战指南连载
时间:10-02
整理:3721RD
点击:
上一节讲完PID控制电机的参数整定(http://bbs.elecfans.com/jishu_581842_1_1.html),这一节来分析四元数与滤波算法
重力加速度计可以换算成角度值,角速度计输出的是角速度。我们需要获取飞行器的姿态就需要知道角度和角速度,角度和角速度输出的波形分别如图20-22、20-23所示。
便于分析滤波,接下来再看看两者的对比图,如图20-24所示。
右图可以看出,角速度相对平滑,动态特性好,静态特性差,角度值动态特性差,抗干扰能力低。直接利用传感器输出的角度值不能满足控制要求,因为干扰太大,利用角速度积分也不可以,因为积分会导致误差的累积,最终导致系统崩溃,因此我们需要一种滤波算法来对角度值进行滤波。这里有个很重要的知识点,四元数和欧拉角的换算,关于换算公式和论证,读者自行查阅资料,网上一搜一大堆,这里不赘。
接下来以角度为例,介绍滤波的作用。角度波形在没有滤波之前,如图20-25所示,波形有明显的毛刺。经滤波之后的角度波形如图20-26所示,对比发现滤波后的波形去除了尖峰,继而抗干扰能力明显增强,可以满足设计要求。
最后再来介绍一下滤波参数的调节以及调到什么程度为好,这个度量又是什么呢?飞蜓二號程序中的函数接口为“void IMUupdate(float gx, float gy, float gz, float ax, float ay, float az)”,其中gx、gy、gz分别对应x、y、z三轴的角速度,ax,ay,az分别对应x、y、z三轴的角度,最后分别得到Pitch为滤波后x轴的角度,Roll作为y轴的角度。
注意:参数是在10ms控制周期下的,若改变了控制周期参数要自行重新调试,便于讲解,再来看看三个滤波参数。
#define Kp 10.1f // 10.1f
#define Ki 0.001f // 0.011f
#define halfT 0.0035f // 0.0035f
Kp参数调节跟随相应速率。数值越大滤波后的波形跟随元波形的程度越大,若数值过大的话会导致滤波效果降低,数值过小会导致跟随缓慢。不同的Kp值,将有不同的滤波效果,便于读者观察,这里我们取三个Kp值,分别为100、1和10,滤波之后的效果分别如图20-27、20-28和20-29所示。其中黄色为滤波前的波形图,红色为滤波后的波形图,读者需要注意的是,由于纸质书为黑白色,看不出红、黄,因此这里笔者将其幅度值大的规定为滤波前的波形图,幅度值小的就为滤波后的波形图。
对比图20-27、20-28可知,Kp为100时,跟随程度几乎和原波形一致,但明显没有滤除干扰;Kp为1时,波形变化明显跟随不上,因此Kp要适当,这就有了下面的Kp值调节。
有了Kp值的研究,接下来再来研究一下Ki、halfT值,这些参数道理类似,只是所体现的功能有别罢了。限于篇幅,这里只给出比较合适参数的Ki、halfT的参考图,分别如图20-30和20-31所示。具体的调试过程留读者自行动手琢磨,单片机的学习,就是要在不断的调试中积累经验,增长技术。
最后说明下和本文配套的STC15开发板目前正在电子发烧友销售,如果需要请戳这里购买: http://bbs.elecfans.com/product/stc15.html 我将持续更新内容.
重力加速度计可以换算成角度值,角速度计输出的是角速度。我们需要获取飞行器的姿态就需要知道角度和角速度,角度和角速度输出的波形分别如图20-22、20-23所示。

图20-22 角度波形图
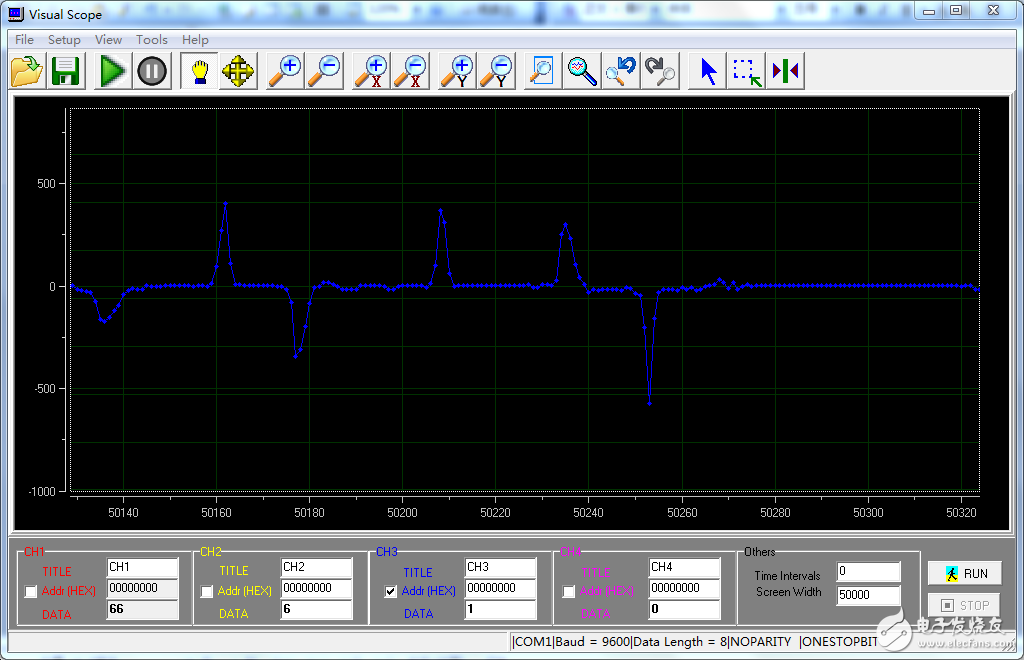
图20-23 角速度波形图
便于分析滤波,接下来再看看两者的对比图,如图20-24所示。

图20-24 角度和角速度对比图
右图可以看出,角速度相对平滑,动态特性好,静态特性差,角度值动态特性差,抗干扰能力低。直接利用传感器输出的角度值不能满足控制要求,因为干扰太大,利用角速度积分也不可以,因为积分会导致误差的累积,最终导致系统崩溃,因此我们需要一种滤波算法来对角度值进行滤波。这里有个很重要的知识点,四元数和欧拉角的换算,关于换算公式和论证,读者自行查阅资料,网上一搜一大堆,这里不赘。
接下来以角度为例,介绍滤波的作用。角度波形在没有滤波之前,如图20-25所示,波形有明显的毛刺。经滤波之后的角度波形如图20-26所示,对比发现滤波后的波形去除了尖峰,继而抗干扰能力明显增强,可以满足设计要求。

图20-25 未进行滤波之前的角度波形图
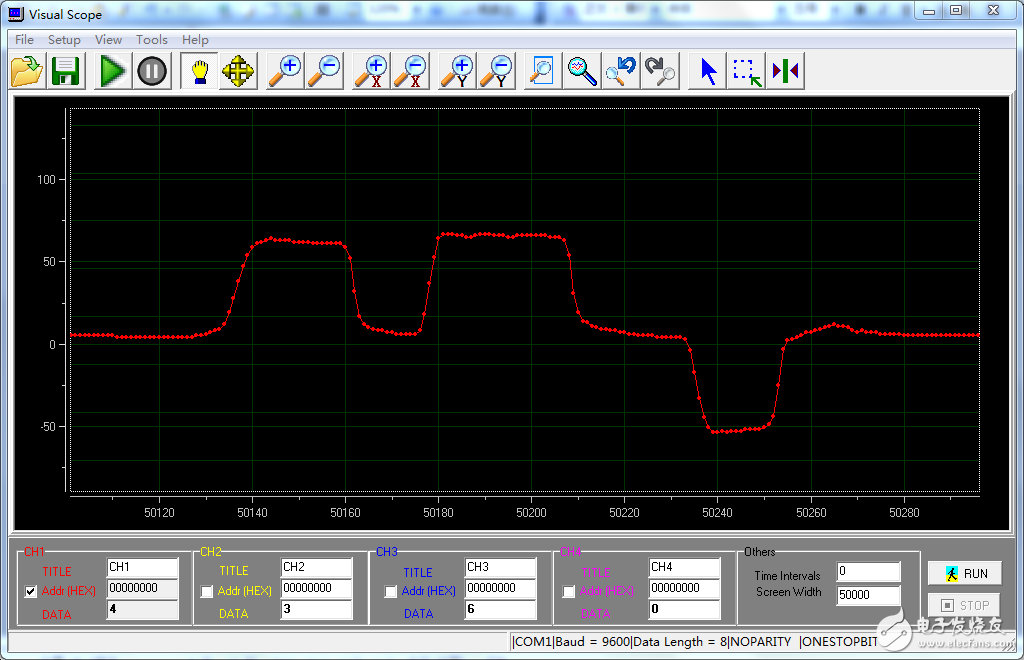
图20-26 滤波之后的角度波形图
最后再来介绍一下滤波参数的调节以及调到什么程度为好,这个度量又是什么呢?飞蜓二號程序中的函数接口为“void IMUupdate(float gx, float gy, float gz, float ax, float ay, float az)”,其中gx、gy、gz分别对应x、y、z三轴的角速度,ax,ay,az分别对应x、y、z三轴的角度,最后分别得到Pitch为滤波后x轴的角度,Roll作为y轴的角度。
注意:参数是在10ms控制周期下的,若改变了控制周期参数要自行重新调试,便于讲解,再来看看三个滤波参数。
#define Kp 10.1f // 10.1f
#define Ki 0.001f // 0.011f
#define halfT 0.0035f // 0.0035f
Kp参数调节跟随相应速率。数值越大滤波后的波形跟随元波形的程度越大,若数值过大的话会导致滤波效果降低,数值过小会导致跟随缓慢。不同的Kp值,将有不同的滤波效果,便于读者观察,这里我们取三个Kp值,分别为100、1和10,滤波之后的效果分别如图20-27、20-28和20-29所示。其中黄色为滤波前的波形图,红色为滤波后的波形图,读者需要注意的是,由于纸质书为黑白色,看不出红、黄,因此这里笔者将其幅度值大的规定为滤波前的波形图,幅度值小的就为滤波后的波形图。

图20-27 Kp=100时滤波前和滤波后的波形图
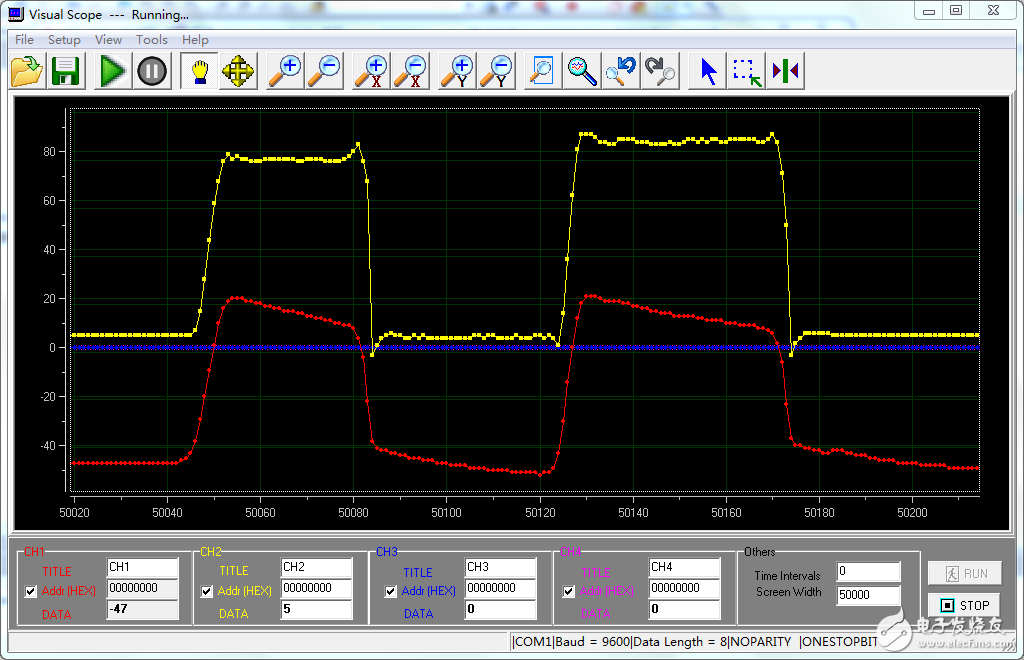
图20-28 Kp=1时滤波前和滤波后的波形图
对比图20-27、20-28可知,Kp为100时,跟随程度几乎和原波形一致,但明显没有滤除干扰;Kp为1时,波形变化明显跟随不上,因此Kp要适当,这就有了下面的Kp值调节。
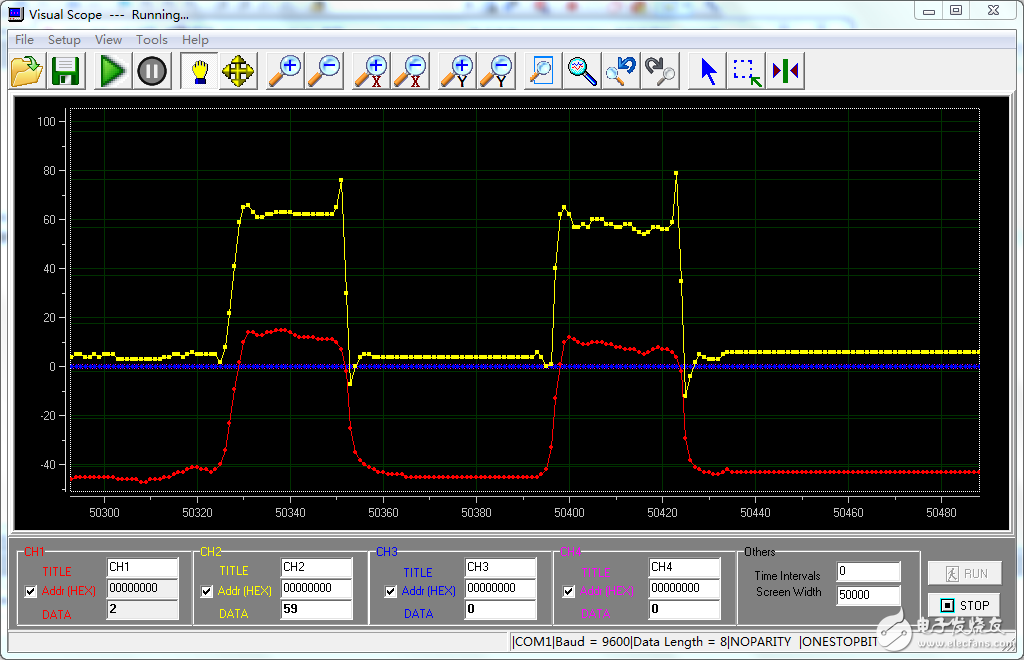
图20-29 Kp=10时滤波前和滤波后的波形图
由图20-29可知,Kp为10的时候,即滤除了干扰毛刺,又有好的跟随动态特性,因此可满足设计要求。有了Kp值的研究,接下来再来研究一下Ki、halfT值,这些参数道理类似,只是所体现的功能有别罢了。限于篇幅,这里只给出比较合适参数的Ki、halfT的参考图,分别如图20-30和20-31所示。具体的调试过程留读者自行动手琢磨,单片机的学习,就是要在不断的调试中积累经验,增长技术。
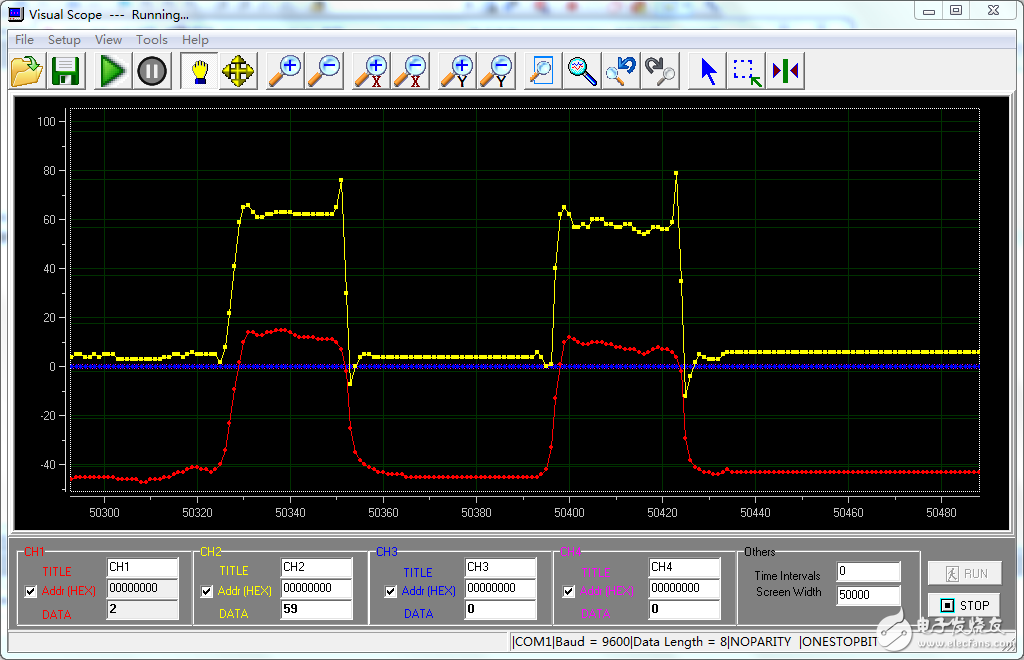
图20-30 Ki比较适当时滤波前和滤波后的波形图

图20-30 halfT比较适当时滤波前和滤波后的波形图
最后说明下和本文配套的STC15开发板目前正在电子发烧友销售,如果需要请戳这里购买: http://bbs.elecfans.com/product/stc15.html 我将持续更新内容.
看看。正在学习中,支持下!
看看。正在学习中,支持下!
看看。正在学习中,支持下!
看看。正在学习中,支持下!
学习中...LZ有木有代码,
学习一下!