四轴飞行器的设计之四轴的运行状况与电机转动的关系-STC15单片机实战指南连载
时间:10-02
整理:3721RD
点击:
四轴飞行器的难点,不在硬件电路的设计上,主要是程序的调试,程序的难点,主要几个算法的研究,接下来,对其算法进行简单的介绍 。
四轴的运行状况与电机转动的关系
在讲述调节PID之前,先来了解一下四轴电机的转动与四轴运行的情况。
1.上下(高度)的控制
通过控制四个螺旋桨(1~4)同时增加(减小)转速,分别实现四轴的上(下)运动,运行示意如图1所示。这点比较好理解,在图1中,因有两对电机转向相反,可以平衡其对机身的反扭矩,当同时增加四个电机的输出功率,旋翼转速增加使得总的拉力增大,当总拉力足以克服整机的重量时,四旋翼飞行器便离地垂直上升;反之,同时减小四个电机的输出功率,四旋翼飞行器则垂直下降,直至平衡落地,实现了沿z轴的垂直运动。当外界扰动量为零时,在旋翼产生的升力等于飞行器的自重时,飞行器便保持悬停状态。保证四个旋翼转速同步增加或减小是垂直运动的关键。
在图2中,电机1的转速上升,电机3的转速下降,电机2、电机4的转速保持不变。为了不因为旋翼转速的改变引起四旋翼飞行器整体扭矩及总拉力改变,旋翼1与旋翼3转速该变量的大小应相等。由于旋翼1的升力上升,旋翼3的升力下降,产生的不平衡力矩使机身绕y轴旋转(方向如图所示),同理,当电机1的转速下降,电机3的转速上升,机身便绕y轴向另一个方向旋转,实现飞行器的俯仰运动。
3.滚转运动
与图2的原理相同,在图3中,改变电机2和电机4的转速,保持电机1和电机3的转速不变,则可使机身绕x轴旋转(正向和反向),实现飞行器的滚转运动。
4.偏航运动
四旋翼飞行器偏航运动可以借助旋翼产生的反扭矩来实现。旋翼转动过程中由于空气阻力作用会形成与转动方向相反的反扭矩,为了克服反扭矩影响,可使四个旋翼中的两个正转,两个反转,且对角线上的各个旋翼转动方向相同。反扭矩的大小与旋翼转速有关,当四个电机转速相同时,四个旋翼产生的反扭矩相互平衡,四旋翼飞行器不发生转动;当四个电机转速不完全相同时,不平衡的反扭矩会引起四旋翼飞行器转动。在图4中,当电机1和电机3的转速上升,电机2和电机4的转速下降时,旋翼1和旋翼3对机身的反扭矩大于旋翼2和旋翼4对机身的反扭矩,机身便在反扭矩的作用下绕z轴转动,实现飞行器的偏航运动,转向与电机1、电机3的转向相反。
5.前后方向的控制
要想实现飞行器在水平面内前后、左右的运动,必须在水平面内对飞行器施加一定的力。图5中,增加电机3转速,使拉力增大,相应减小电机1转速,使拉力减小,同时保持其它两个电机转速不变,反扭矩仍然要保持平衡。按图1的理论,飞行器首先发生一定程度的倾斜,从而使旋翼拉力产生水平分量,因此可以实现飞行器的前飞运动,向后飞行与向前飞行正好相反。当然在图1、图2中,飞行器在产生俯仰、翻滚运动的同时也会产生沿x、y轴的水平运动。
6.侧向运动
在图6中,由于结构对称,所以侧向飞行的工作原理与前后运动完全一样。
四轴的运行状况与电机转动的关系
在讲述调节PID之前,先来了解一下四轴电机的转动与四轴运行的情况。
1.上下(高度)的控制
通过控制四个螺旋桨(1~4)同时增加(减小)转速,分别实现四轴的上(下)运动,运行示意如图1所示。这点比较好理解,在图1中,因有两对电机转向相反,可以平衡其对机身的反扭矩,当同时增加四个电机的输出功率,旋翼转速增加使得总的拉力增大,当总拉力足以克服整机的重量时,四旋翼飞行器便离地垂直上升;反之,同时减小四个电机的输出功率,四旋翼飞行器则垂直下降,直至平衡落地,实现了沿z轴的垂直运动。当外界扰动量为零时,在旋翼产生的升力等于飞行器的自重时,飞行器便保持悬停状态。保证四个旋翼转速同步增加或减小是垂直运动的关键。
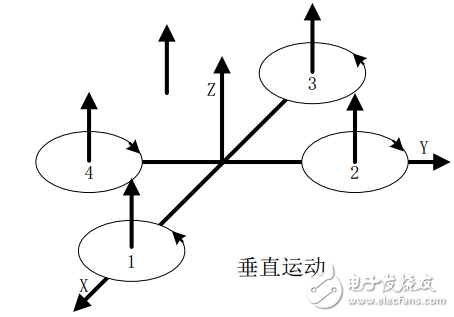
图1 四轴上下运行与螺旋桨转动关系图
2.俯仰运动在图2中,电机1的转速上升,电机3的转速下降,电机2、电机4的转速保持不变。为了不因为旋翼转速的改变引起四旋翼飞行器整体扭矩及总拉力改变,旋翼1与旋翼3转速该变量的大小应相等。由于旋翼1的升力上升,旋翼3的升力下降,产生的不平衡力矩使机身绕y轴旋转(方向如图所示),同理,当电机1的转速下降,电机3的转速上升,机身便绕y轴向另一个方向旋转,实现飞行器的俯仰运动。
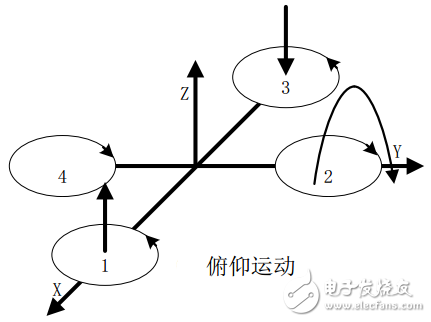
图2 四轴俯仰运行与螺旋桨转动关系图
3.滚转运动
与图2的原理相同,在图3中,改变电机2和电机4的转速,保持电机1和电机3的转速不变,则可使机身绕x轴旋转(正向和反向),实现飞行器的滚转运动。
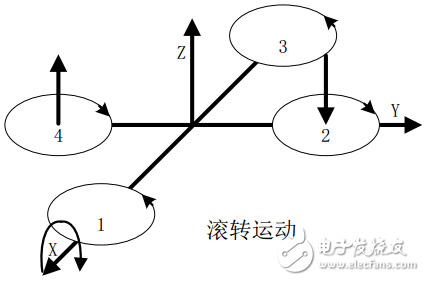
图3 四轴滚动运行与螺旋桨转动关系图
4.偏航运动
四旋翼飞行器偏航运动可以借助旋翼产生的反扭矩来实现。旋翼转动过程中由于空气阻力作用会形成与转动方向相反的反扭矩,为了克服反扭矩影响,可使四个旋翼中的两个正转,两个反转,且对角线上的各个旋翼转动方向相同。反扭矩的大小与旋翼转速有关,当四个电机转速相同时,四个旋翼产生的反扭矩相互平衡,四旋翼飞行器不发生转动;当四个电机转速不完全相同时,不平衡的反扭矩会引起四旋翼飞行器转动。在图4中,当电机1和电机3的转速上升,电机2和电机4的转速下降时,旋翼1和旋翼3对机身的反扭矩大于旋翼2和旋翼4对机身的反扭矩,机身便在反扭矩的作用下绕z轴转动,实现飞行器的偏航运动,转向与电机1、电机3的转向相反。
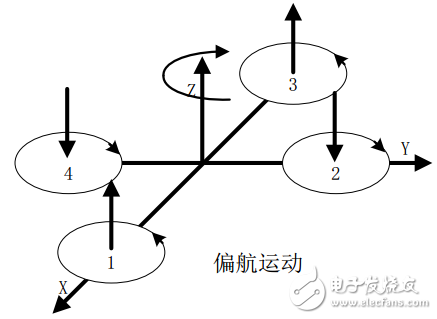
图4 四轴滚动运行与螺旋桨转动关系图
5.前后方向的控制
要想实现飞行器在水平面内前后、左右的运动,必须在水平面内对飞行器施加一定的力。图5中,增加电机3转速,使拉力增大,相应减小电机1转速,使拉力减小,同时保持其它两个电机转速不变,反扭矩仍然要保持平衡。按图1的理论,飞行器首先发生一定程度的倾斜,从而使旋翼拉力产生水平分量,因此可以实现飞行器的前飞运动,向后飞行与向前飞行正好相反。当然在图1、图2中,飞行器在产生俯仰、翻滚运动的同时也会产生沿x、y轴的水平运动。
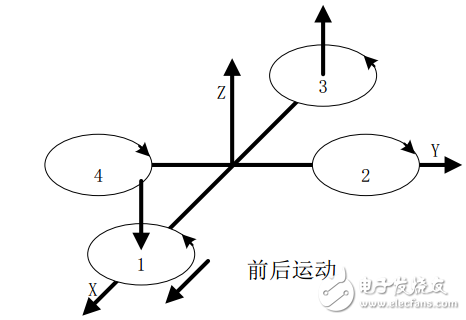
图5四轴前后运行与螺旋桨转动关系图
6.侧向运动
在图6中,由于结构对称,所以侧向飞行的工作原理与前后运动完全一样。
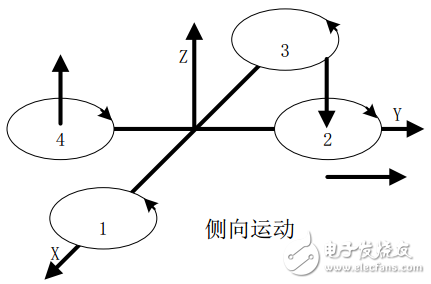
图6 四轴侧向运行与螺旋桨转动关系图
最后说明下和本文配套的STC15开发板目前正在电子发烧友销售,如果需要请戳这里购买: http://bbs.elecfans.com/product/stc15.html 我将持续更新内容,下一节讲
PID控制电机的参数整定。
这个项目很好,众筹到什么时候结束
月底哦,要支持迅速哦
基本原理了解了
基本原理了解了
不错的分享,多谢了!