关于平衡小车速度环和角度环的理解问题。
时间:10-02
整理:3721RD
点击:
朋友们,我想请教一下,为什么平衡小车只有角度环作用的时候,只能维持短暂的平衡然后小车就会朝一个方向倒下,然后电机会朝着那个方向运动,但是此时电机的运动不足以产生让小车再次平衡的加速度?为什么加上速度环之后,就可以平衡了?速度环和角度环这两者到底之间是什么关系呢?跪求朋友们给我讲讲吧,想了三天了,没想明白,为什么只有角度环不足以让小车在倒下时电机运动保持平衡?
这个是我只加角度环以后的视频:
补充内容 (2016-1-28 17:40):
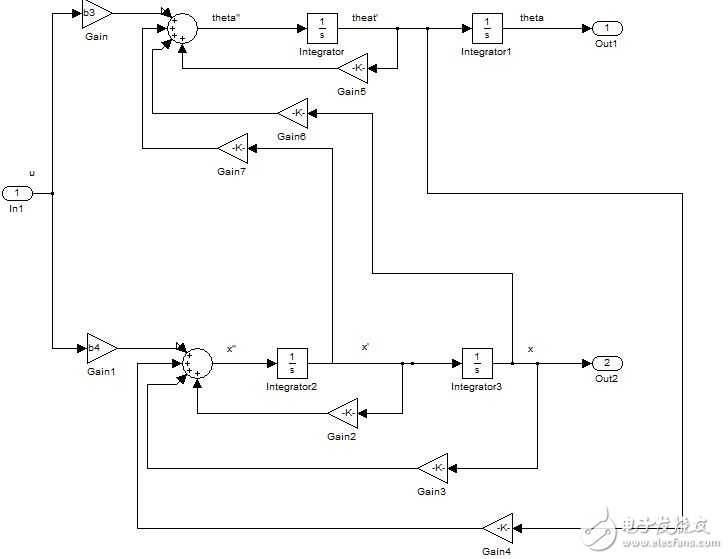
这个是平衡车的数学模型,还没画反馈
角度环包括两个增益的反馈,速度环也包括两个
自己顶顶吧,大家帮帮我。
小编学过状态空间方程吧,速度环和角度环是这么一个关系(请看x'和theta):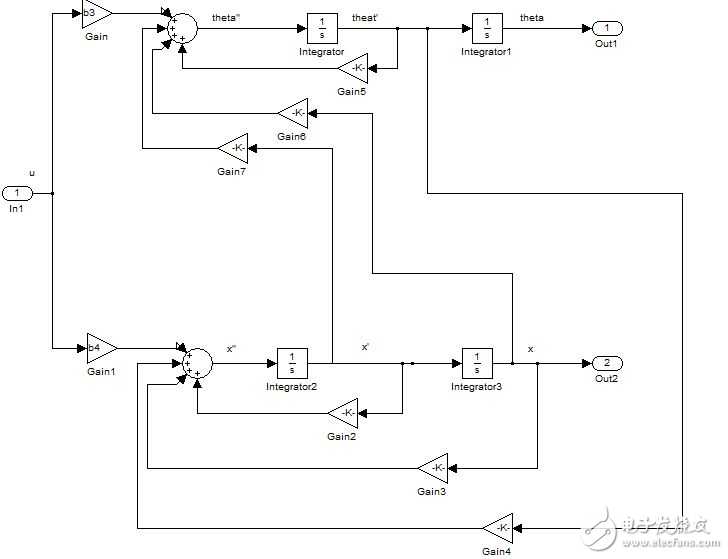
这个是我只加角度环以后的视频:
补充内容 (2016-1-28 17:40):
这个是平衡车的数学模型,还没画反馈
谢谢您的回答,我只学过自控原理,空间状态方程我还真不知道。您给的simulink仿真我还一下子真看不懂。能否麻烦您稍微通俗点给我讲讲。速度环到底起什么作用?为什么一个角度环不够呢?还有,网上说速度环是正反馈,角度环是负反馈,这个怎么理解呢?难道倾斜角度增加,电机速度减小么?我一直想不明白,快疯了。我觉得都是正反馈啊!您要是方便留个qq的话,能否qq请教您呢?十分感谢您的讲解!辛苦了。
上面那个图是数学模型,角度环、速度环在这里,都是负反馈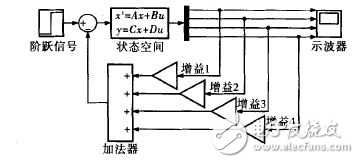
角度环包括两个增益的反馈,速度环也包括两个
我觉得位移或者速度或者加速度属于一种对角度的干扰,这些控制好,角度性能更好了
留你qq,讨论讨论
好的好的,1050434095,您加我吧。