适用于工业机器人和电机驱动的参考设计(24V 输入, 5V@4A输出)
众所周知,动力系统是最耗电的,比如从前我们用过的录音机随身听,电池电力消耗很快,当不能驱动录音机后,那电池还可以正常的给收音机供电,给手电筒供电等。
在工业机器人和电机驱动上也是一样,运动系统可谓是最为耗电的,没有足够的电流驱动是没法提供所需电机驱动力。
TI为此推出了可提供24V 输入, 5V@4A输出的暴强驱动能力的参考设计。
————————————————————————————————————————————————————————————————

————————————————————————————————————————————————————————
描述
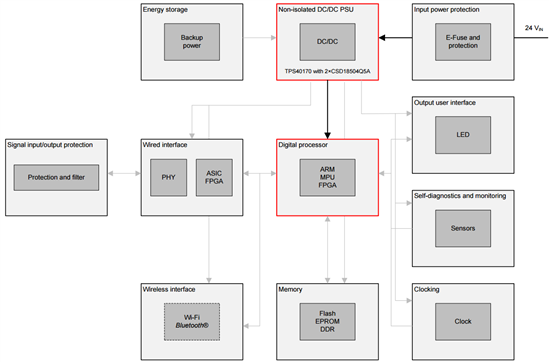
PMP15025 包含一个单相同步降压转换器,从 24V 输入提供稳定的 5V @ 4A 解决方案。此设计的特点是具有高效率和高功率密度,适用于工业自动化应用,例如机器人和电机驱动。
特性
- 在 24VIN,5V/4A,390kHz 下的效率为 90%
- 满负载电流下的输出纹波为 4.44mV
- 满负载电流下具有最小的相位振铃
- 30kHz 环路带宽,75° 相补角,具有快速、稳定的瞬态响应
——————————————————————————————————————————————————————————————————
参数
| PMP15025.1 (Output Voltage 1) | |
|---|---|
| Vin (Min) (V) | 20 |
| Vin (Max) (V) | 28 |
| Vout (Nom) (V) | 5 |
| Iout (Max) (A) | 4 |
| Output Power (W) | 20 |
| 隔离/非隔离 | Non-Isolated |
| 输入类型 | DC |
| 拓扑 | Buck- Synchronous |
——————————————————————————————————————————————————————————————
工业机器人随着频繁的使用和时间的积累,难以避免一些设备的耗损和破坏,导致机器人不能正常运作,耽误整体的效率,所以电源板要求具有抗干扰能力强,输出稳定的特性,机器人电源一般以模块形式封装,供给电机驱动器,主控板,和IO板供电使用,应该有适当的隔离和保护电路。TI的方案可用于一般工业机器人主控柜,但是负载能力再大的话可能需要多块来解决。
动力系统是最耗电的,在工业机器人和电机驱动上也是一样,运动系统可谓是最为耗电的,没有足够的电流驱动是没法提供所需电机驱动力。但是就在去年,我们重庆邮电大学研发出了一款高效步行机器人,其行走效率已处于国际领先水平。它的步态自然优雅,身高为115厘米,体重仅9.6公斤,虽然机器人长相不是很好看,不能算是高富帅,但的确是个潜力股,作为重庆邮电大学的一名研究生,我还是感到非常高兴的,也为我们学校取得的成就表示祝贺。这也是我们学校研制出世界上第一个成功研制出世界第一部 TD-SCDMA 3G 手机样机及世界上第一颗采用 0.13 微米工艺的 TD-SCDMA 手机核心芯片后的又一壮举。
这种机器人是四足机器人,能直行、拐弯、上下缓坡,步态轻盈,行走效率跟人接近。与目前世界上大多数行走机器人采用静态步行理论不同,"行者一号"采用了一种全新的"主动+被动"动态步行理论,能根据外界环境自动调整行走姿态和速度,从而保持身体平衡避免摔倒。
由于项目预算很少,为了节约成本,核心电机是从网上淘的二手机件,许多零件都要自己动手加工。也许没有TI公司PMP15025 包含一个单相同步降压转换器这样性能较好的器件,也没有Ti公司推出的三项无刷PMSM低电流点击控制解决方案,但是我们学校的老师和学生还是通过自己的努力,以及一些便宜的器件和设备,还是取得了很大的成就。相比传统机器人,“行者1号”行走速度快,能耗低,运输成本是类似机器人中最低的。通过进一步优化,其行走距离已从40公里提升到53公里,只需耗电0.5度。
“行者一号”突破了机器人节能行走的关键技术,在足式机器人的结构设计、控制方法上取得重要进展,从而促进仿人机器人的研究。不仅可以大幅提高现有仿人机器人的续航、载荷、作业能力,而且可望在此基础上研制出更自然的智能假肢,还可据其原理研发老人助行器等。“行者一号”还可以根据实际具体需求,加装相应设备,替代人类进入危险环境进行巡检、远程作业等。
行者一号的研发成功,证明了我们学校、我们国家在机器人节能方面取得了很大的成就,处于世界前列,对于以后更好的研发助行器以及替代人类进行一些危险的工作,有很大的帮助,对于能耗要求更高的场景有着很好的前景。期待我们国家机器人行业越来越好。



数据说话,我们来看,2014年中国工业机器人市场销量达5.7万台,相比于与2013年的3.6万台同比增长55%,约占全球市场总销量的1/4。中国已经连续两年成为全球第一大工业机器人市场,但其中2013年国内企业仅占中国市场销量的15%左右。
国际机器人联合会(IFR)统计,2005—2014年间,中国工业机器人市场销售量的年均复合增长率为32.9%,而2004—2013年间为29.8%。
预计到2017年,工业、服务和特种机器人的全球市场规模将达到750亿美元,并带动相关产业上千亿美元的增长。2013年,中国每万名制造业从业人员机器人保有量仅为25台,而世界平均水平为58台,其中韩国396台、日本332台、德国273台。对于机器人应用最多的汽车行业,先进汽车生产国的工业机器人使用密度均己达到1000台/万人,而中国仅为213台/万人
再者,智能产业对劳动人口的能力提出了更专、更深、更高,有时的要求甚至凭人工根本就不行。这使得供需双方的差距更加扩大,必须靠机器人这类工具进行“补偿”。否则,不但产业无法升级,整个社会的竞争力都会受到影响。
机器人的核心就是它的控制系统,控制系统又需要有电机驱动,电机驱动又需要有一个可靠的能提供大电流的电源。例如最近非常热的 波士顿动力Handle两轮机器人,动作协调、会跑能跳,除了需要先进的传感器、牛X的算法及控制部分,一个稳定的电源也是非常重要的。TI推出的PMP15025能提供24V输入,输出5V4A的设计,具有高效率和高功率密度。有了良好的电源也得有一个电池管理芯片啊,不能机器人屁股上拖个电线跑吧,TI的TIDA-00982参考设计是一款2S1P电池管理方案的设计,具有监测、保护、平衡和充电功能,非常适合用于机器人等的产品设计。
对工业机器人关节驱动的电动机,要求有最大功率质量比和扭矩惯量比、高起动转矩、低惯量和较宽广且平滑的调速范围。特别是像机器人末端执行器(手爪)应采用体积、质量尽可能小的电动机,尤其是要求快速响应时,伺服电动机必须具有较高的可靠性和稳定性,并且具有较大的短时过载能力。
TI的PMP15025具有高效率和高功率密度,输出纹波仅为4.44mV,具有快速、稳定的瞬态响应,的确难能可贵,做到了高可靠性。
机器人技术是现也将会是今后非常有前景的技术,个人认为主要应用方向有:军事领域、消防安全、工业应用、家庭服务机器人等等 。机器人是一个非常复杂的系统,它包含了各种伺服电机,由于动力系统最耗电的部分就是电机,所以降低电源转换损耗对于降低机器人的额外损耗具有非常重要的意义。市面上伺服电机驱动的方案非常多,很多却无法同时提供高效、低纹波和大功率功能,PMP15025 能在24V输入,5V/4A,390Khz的负载下效率可达90%,满负载的输出纹波为4.44mV,此为电机的动力驱动提供了非常好的方案和选择。
兵马未动粮草先行,再好的机器人没了能源供应一样是英雄气短呀。TI为此推出的可提供24V 输入, 5V@4A输出的暴强驱动能力,是一种为未来市上早做图谋。24V 的输入,看来即使你出行也不妨可以带上个机器人为你服务了,需要补充电能的话,开着车就能驱动其工作了。不过未来可能采用太阳能和辐射能随时用散碎能充电维持运行的方案可以更具实用性吧。
对于机器人来说,源源不断的动力供给是必不可少的,TI为此推出了可提供24V 输入, 5V@4A输出的暴强驱动能力的参考设计,不知道有没有人试用过这个参考设计,稳定性如何呢?高效率高密度,在我的理解中,此系统寿命应该不会太长吧
电机用途广泛。国际能源署称,电机消耗全球近一半的电能;提高电机驱动系统的效率有望使全球电力消耗降低9% 到14%。电机技术正在从有刷电机向无刷电机和三相FOC电机演化。
TI是全球半导体市场的领导者,悠久的历史中,结合了先进的电机控制专业知识与模拟和嵌入式处理投资组合,并提供完整的电机系统的解决方案。选择TI为广泛的电机的专业知识,更广泛的选择和 全面的支持,有效、可靠、高性价比的驱动和控制的解决方案。TI在中国市场推行的DRV8x集成电机驱动IC,可使顾客能快速而方便地旋转它们马达,减少产品进入市场的时间,大大简化设计。其内部 集成整合的栅极驱动电路,完善的保护电路(过流/欠压/热保护)、工业标准控制接口,在TI提供的完整的驱动算法的基础上,大大减少方案的复杂性。
TI的PMP15025设计,从24V输入提供稳定的5V/4A,效率高达90%,并且满负载电流下具有最小的相位振铃,超低的输出纹波电压,值得信赖!
机器人的动力系统是整个机器人除了控制器模块之外最重要的部分,需要为机器人的执行系统提供动力源,同时要能够带动电机。就目前来说,工业上面见得最多的就是24V的电源,一般一个机器人电路板(驱动系统加控制系统)都会引入一路24V的电源,为整个板子提供电源,这个24V的电流是足够大的,那么剩下的问题就是如何将这个24V的电源转换成5V的电源给控制系统(包括MCU、存储、显示、通讯模块)供电。这种控制系统由于要驱动很多路继电器或是MOS管,因此需要的功率很大,电压又恒定是5V,这时就需要想办法尽可能提高电流值了。TI的这套驱动方案,能够提供稳定的5V 20W的输出,纹波仅为4.44mV,使得稳定性大为提高,减少控制系统出错的概率。机器人控制器因为纹波过大导致系统出错的案例本人也时常见到,最典型的就是MCU突然不工作。
同时,这套方案所用的元件较少,一方面减少成本,另一方面减少PCB面积,确实是工业机器人电源不错的解决方案。
智能设备和机器人的发展普及,貌似已成趋势。就功能来说目前的技术实现起来已不成问题,精密程度满足一般的工业应用和商业应用也都不是难题。
估计未来困扰其发展的一个很大的因素就是能源和效率的问题。不管功能如何强大,如果不能解决好能源和效率的问题,就只能是一种摆设,或者耗费大量的成本在电池的更换和频繁充电上。
电池是一种基础和材料技术,一般突破很困难,不期待短时期内有大的突破。在电池管理上下些功夫,将是唯一的选择。
期待TI的电源管理产品不断推陈出新,将电池的能量发挥到最大的程度。
-
机器人技术是今后发展一个主方向,代替传统体力劳动,个人认为主要应用方向有:军事领域、消防安全、工业应用、家庭服务机器人等等 。机器人是一个非常复杂的系统,它包含了各种伺服电机,由于动力系统最耗电的部分就是电机,所以降低电源转换损耗对于降低机器人的额外损耗具有非常重要的意义。市面上伺服电机驱动的方案非常多,很多却无法同时提供高效、低纹波和大功率功能,PMP15025 能在24V输入,5V/4A,390Khz的负载下效率可达90%,满负载的输出纹波为4.44mV,此为电机的动力驱动提供了非常好的方案和选择,机器人目前市价普遍偏高,普及及价格有待进一步平衡。
电源在整个控制系统中是很重要的,我以前设计过给单片机供电的电源,不是电压不稳,就是容易烧电源稳压块。TI提供了稳定的电源设计方案。我想这在机器人控制方面,是为后来人提供了很好的参考设计,也为设计机器人电源缩短了时间。
20多年前,机器人是一个多么高大上的称呼,我们也只能从电视上看到机器人的身影,如今机器人已经走进了我们的生活。从扫地机器人到儿童教育机器人,从深空探测机器人到无形机器人阿尔法狗,机器人正在慢慢改变我们的生活和认知。然而,当人工智能“阿尔法狗”化身“Master”,在围棋界掀起“腥风血雨”,连续击败多名顶级围棋选手。曾号称人类智力游戏最后堡垒的围棋,都这么轻易被攻陷,让人细思恐极。多少年后,人类是否会被机器人奴役,这也许是值得我们思考的事情。
机器人是一门多学科交叉的技术,涉及到机械设计、计算机、传感器、自动控制、人机交互、仿生学等多个学科。
因此,机器人领域中需要研究的问题非常多,而其中感知、定位和控制是机器人技术的三个重要问题。
目前国际机器人界都在加大科研力度,进行机器人共性技术的研究。从机器人技术发展趋势看,焊接机器人和其它工业机器人一样,不断向智能化和多样化方向发展。具体而言,机器人的发展主要有一下八大趋势。
应用点焊机器人这种技术可以提高焊接质量,因此企业主甚至试图用它来代替某些弧焊作业。在短距离内的运动时间也可大为缩短。国内汽车厂家在生产后桥、副车架、摇臂、悬架、减振器等轿车底盘受力安全零件大都是以MIG焊接工艺为主,主要构件采用冲压焊接,板厚平均为1.5~4mm,焊接主要以搭接、角接接头形式为主,焊接质量要求相当高,其质量的好坏直接影响到轿车的安全性能。应用机器人焊接后,大大提高了焊接件的外观和内在质量,并保证了质量的稳定性和降低劳动强度,改善了劳动环境。
焊接机器人主要包括机器人和焊接设备两部分。机器人由机器人本体和控制柜(硬件及软件)组成。而焊接装备,以弧焊及点焊为例,则由焊接电源,(包括其控制系统)、送丝机(弧焊)、焊枪(钳)等部分组成。对于智能机器人还应有传感系统,如激光或摄像传感器及其控制装置等
机器人应该是未来十年最热门的发展行业之一,机器人系统中电机控制是核心,为电机工作提供稳定、高效与低噪声的电源是关键;
我感觉对于移动式机器人最为关键的部分分为三大部分:机械传动机构、电子软件控制机构、电源支持系统。
对于机械传动机构我们主要要考虑的是地址的连贯性和稳定性以及灵活性,这些对于机械理论和制造技术已经十分成熟的今天来说问题不是太大
对于电子软件系统,这个要考虑的是和各种电子硬件检测 执行系统的互联互通,这个要求的是系统的稳定性,高速性和精准性。现在有很多大的IT厂商已经相继推出自己针对机器人的专用IC或者CPU,这个非常不错
电源部分一直是机器人的软肋,这个一点牵扯到机器人的巡航历程和输出功率的问题,这就好比是汽车所使用的汽柴油。一款低功耗、输出保护功能强大的IC是我们经常搞机器人所梦寐以求的。而TI推出的PMP15025 使我们找到了一块两者兼顾的IC。它包含一个单相同步降压转换器,从 24V 输入提供稳定的 5V @ 4A 解决方案。此设计的特点是具有高效率和高功率密度,非常适合用来控制机器人和电机驱动。
对于PMP15025 如此优异的性能,我深感满意,以后我会推荐给更多同行使用的
工业机器人和电机驱动是最为耗电的,如没有足够的电流驱动是没法提供所需电机驱动力。TI采用PMP15025芯片制作24V 输入,5V@4A输出方案可以解决驱动耗电问题,是解决当前工业机器人和电机驱动耗电问题可行方案之一。不过,市场是靠产品说话的,PMP15025方案能否赢得用户认可仍需时间的检验。
自从美国iRobot在2002年推出全球第一款扫地机器人之后,扫地机器人开始风靡全球。由于家庭清洁是智能扫地机器人独自完成的,对于智能扫地机器人的生产厂家来说,除了产品的智能化,产品的可靠质量对于消费者而言更加重要。电源系统是智能扫地机器人的供电方式,由于扫地机器人是以自主方式工作的,因而所用的电源为采用随机身携带的蓄电池,好的电源管理控制,能够使机器人能够长时间的工作,不用来回充电。
我擦,5v4A是个什么水平。。都知道,机器人最大的限制就是在驱动能力上,要想机器人功能强大,这驱动能力不能小,不然怎么跟你做事嘛,ti的这设计简直了,这样就完全不用担心机器人驱动能力不足而减少功能了。学习了,虽然暂时不需要用这么牛逼的驱动。
大电流驱动才是消费类电子应用的一个痛点和难点,如果解决这个问题,在较高的转换效率下控制好EMI将会是一个很有市场前景的应用,本文给出的方案很好解决了这个问题,输入电压范围也刚好符合储能系统的供电电压范围,再加上对放电的合理逻辑控制就相当的完美了。
就如文章所述工业机器人和电机驱动上的运动系统可谓是最为耗电的,没有足够的电流驱动是没法提供所需电机驱动力的,我认为以后驱动的趋势是要向高压直流供电方向发展,50v以上的供电电压,将会大大减少线路损耗,提高供电系统的效率,电机驱动力也越强,更好的适应工业机器人的需求。
输出要作保护,不敢保证接线的短路。
目前的机器人能动,能走,能飞,能说话,甚至能有一定思维,无疑是人类的最大创举,真希望机器人可以早点普及到人间,而不是仅仅停留在国家机关和研究室里。机器人的运动确实离不开电机驱动,电流驱动也是主要。从这款电路设计看,隔离电路,保护电路相信都应该会做的不错,如果能保持一种设计稳定,电路稳定,安全,自然是最好的,还要降低功耗,提高性价比。如果有可能,在设计中对于机器人外表的美化所涉及到的热问题也要考虑到,这些也是设计未来的一部分。