关于DRV8828驱动有刷直流电机发热的问题
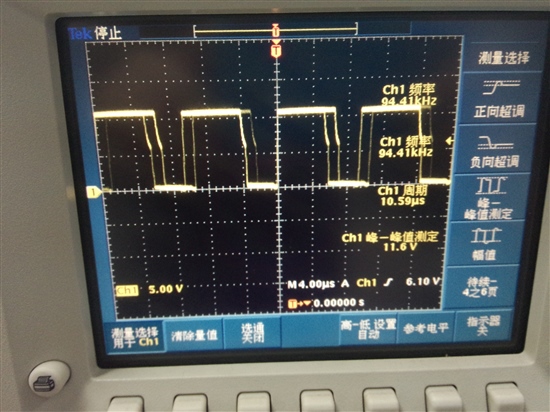
按照官方文档,DRV8828是专门为步进电机设计的。但是文档中说也可以驱动直流无刷电机。参照设计文档,我把PWM输入信号连接到Phase引脚,使能引脚常有效。输出波形总是出现抖动。驱动空心杯电机发热严重,当输入PWM占空比为50%时,电机有噪声,抖动现象。用示波器看到的输出引脚PWM占空比出现明显的跳动(波形中输入PWM占空比为66%)。附件中给出了波形图。其中PWM频率设为100K,降低频率后略有改善,但是问题依旧存在,电机发热严重。而采用H桥芯片(如L298)测试就没有问题,电机控制流畅。求解决办法。本人以前使用TI芯片参照手册基本都是一次成功,这次直接做板500套,不会是芯片选型的问题吧!
你好,建议把频率降至10-30Khz,底面敷铜面积加大一点
您好,底部已经大面积铺铜(按照手册画的封装),附件中pwm为20k的波形,依旧能够看到占空比波动,电机发热严重,请问这有可能是什么原因造成的呢?是芯片本身的特性问题吗?(芯片是正品,没有问题)。感谢!
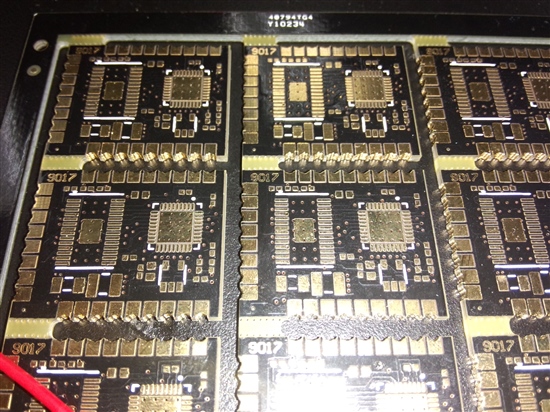
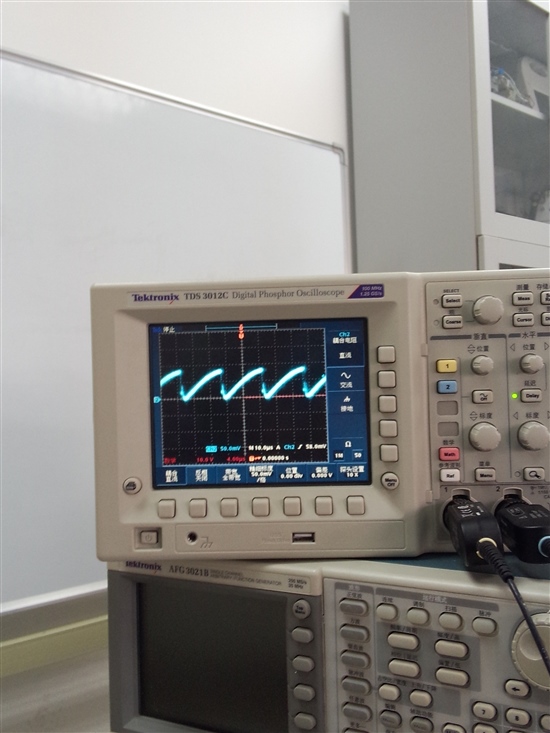
PCB 和电流波形
这个芯片多数还是用在步进电机驱动上的,一般选择驱动直流电机使用DRV8840,DRV8841/8842.你试一下DRV8840吧,这个封装时基本一样的
你好!
DRV8828内部只集成了一个H桥,我想了解一下您是采用什么样的方式来控制空心杯电机或者直流无刷电机的?
Best regards
Axel
最初是想根据TI的一个关于步进电机和直流电机驱动芯片选型的手册,将PWM信号输入到Phase引脚,改变PWM的占空比实现速度和转向的控制。
外面是有单片机的,根据编码器做PID控制
Hi
根据数据手册,应当将PWM信号输入到Enable引脚控制电机转速,phase引脚控制方向,通过调节PWM占空比来实现速度控制,通过GPIO数字量输出来实现方向的控制。
Best regards,
Axel
这种控制方式就只能使用DRV8840了,电子市场上价格高出好多。请参见《Selecting Among DRV88xx Devices to Drive Brushed orStepper Motors》中的3.1节!里面介绍了使用PWM驱动Phase的方法。这也是我设计的依据!但是TI坑爹的用了一个词:At the same time, it is safe to assume that since the ENABLE line is not actuated during this type of implementation, it is possible to effectively use the DRV8812/13/28/29 devices to drive brushed DC motors.


你好!
根据DRV8840 和DRV8828 对比,个人认为DRV8828也能够实现上面所描述的通过Phase引脚PWM调速调方向的控制。
您这边出现的异常有可能是别的原因所导致的。我想可以再具体看看您设计中关于电机部分更为详细的设置,比如说DRV8828电流限等。最好能够结合原理图和PCB的相关内容。
谢谢!
Axel
您好,
单一PWM方式的确是一种直流电机驱动方式,占空比同时控制电机的方向和转速,但电机的总发热是会明显高于采用Phase+enable方式的。尤其是在50%占空比附近,电机虽然不动,但是线圈上任然持续通过电流(交流电流),这就好像把方波或者正弦波加到一个感性负载,电能消耗在电感量不大的情况下是非常明显的。但是对于足够大电感的电机,小电流应用,且不经常工作在50%占空比(低速)附近的话,是可以忽略的。
既然你选择了一颗高电流芯片,说明你的电机功率还是很大的,这也意味着这是一颗低电感、低阻抗、大电流电机,因此它不适合用这种方式来驱动。
应该采用Phase+enable 的全桥驱动方式,phase决定方向,PWM->enable 决定输出功率,这样在电机不动时,电机完全没有电流,低速时,电机只抽取所需的电流。
完全同意您的看法。感谢。最初我考虑发热的问题了,这是不可避免的。主要是占空比抖动是我一直没有弄明白的。可能这类芯片的设计本身不适合在Phase上输入PWM吧。现在已经修改设计重新打样了。
完全同意您的看法。感谢。最初我考虑发热的问题了,这是不可避免的。主要是占空比抖动是我一直没有弄明白的。可能这类芯片的设计本身不适合在Phase上输入PWM吧。现在已经修改设计重新打样了。
这个我也很奇怪,类似的测试实验是做过的,Phase上本身是可以通上PWM信号的。现在的推测是:
因为是从输出端看占空比变化,它上面实际上叠加了电感续流的时间,这个时间是随电机的抖动或电刷的影响可能发生变化的,另外续流路径(decay模式的设置)也会影响这个续流时间,还有就是DRV8828本身的Rsense限流设定也可能影响到它,因为可能处于时而到电流限时而没到的情况,限流动作会造成续流情况不一样,最终表现为输出PWM下降沿不可预计的抖动。
如果改版还有问题的话,还请给出相应的电路图,我们会尽力帮助解决。
Thanks!
我最初的怀疑和您一样,这几天做了测试。第一:我禁用了限流功能,效果不变。第二:PWM控制Phase时,Enable长有效,Decay模式应该没有起作用,但是我尝试改变Decay的设定,结果依旧。第三,断开负载,直接测试输出,PWM占空比依旧抖动。第四:PWM控制enable,GPIO控制Phase,PWM占空比的稳定性非常好(50kHz)。最后我觉得还是芯片本身的设计造成Phase引脚不适合输出高频信号吧。所以最终换了传统的应用方案。等一个礼拜差不多打样回来,应该问题不大。感谢您的热心帮助!
刚刚申请了 drv8801 和 drv8871 想使用楼主贴出的方案设计产品,不知道会不会遇到同样的问题? 请TI高手们不吝赐教。