cc1310数据收发问题
在做CC1310数据收发测试,当然,两块cc1310通信是没问题的,但想要兼容我们其他的发射模块,于是用的一个CC1310和我们的另一个射频模块做通信测试:
1. CC1310发,另一款RF收,结果:
a. 当发送的数据内容为01 02 03 04...这样不相同的数据时候,能正常的收到“前导码+同步字+数据内容”
b. 当发送的数据内容为 00 00 00 00 00...这样全为00的数据时候,收到的数据就比较乱,与“前导码+同步字+数据内容”的帧格式无法对应;
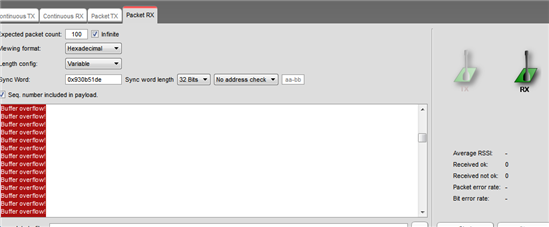
2. CC1310收,另一款RF来发射,由于这款RF的前导码与cc1310不同,于是我将发送包模拟为CC1310的帧格式,即实际发送的为“另一款RF的特定帧头+ cc1310 的(前导码+同步字) + 数据内容” 理论上CC1310能够接收发送帧然后剥离前导码同步字获得数据内容, 但是实际却是半天收不到,过了一会儿smartRF Studio接收窗口出现"Buffer over flow!" 这是咋回事?
3. CC1310的前导码只能是“0101” “1010” 为啥不能像cc1125一样支持4种前导码模式呢? 以后能不能增加“0110” “1100"这两种模式的?
1. 加个whitening应该会有所改善。
2. 觉得不会。他preamble解不出就没办法。
3. 目前只能支持5和A。
1. 加whitening我会试下。
2. 觉得不会。。。大哥,弄啥咧。。。 原因?不能是主观觉得吧。。 那个buffer over flow的原因是啥?是因为接收到了数据但Radio CPU找不到正确的Preamble和sync,认定为无效数据,但又没有将缓冲区清空,所以才会出现“Buffer over flow"? 但如果是这样,那我将rxConf中的bAutoFlushIgnored 和bAutoFlushCrcErr均置为1,仍然是这样啊!所以能讲原因么。
论坛上的回答请不要惜字如金好么,很多时候大家需要的是搞清楚整明白,就算提问者只要一个答案,但你解释清楚也能方便后来观帖子的人啊!
大神,想向你请教下关于CC1310的一些问题,方便加扣扣吗?1017598227,我的扣扣。
你好,我刚刚开始学习cc1310,请问怎样将RX接收到的数据打印出来?上面用的是什么软件呢?谢谢
你好,该软件已找到,RX接收到的数据可以通过console打印出来吗?
Rx接收到的数据可以在smartRfF Studio下方的空白框里显示出来啊。
你也可以通过代码将接收到的数据通过串口打印出来啊
你自己做的射频模块和CC1310,频点看过吗?有没有偏差?
用频谱分析仪看过,没偏差
前导码是一般0101是给芯片启动时间,真正开始接收是从同步字开始,同步字必须要匹配,否则不会接收,包括最后的校验,校验不对也会认为是错包。
你的另一个模块前导码是多少?整个包是怎样的结构?
您好,请问在easylinkrx中定义rx的地址怎么定义呢?rxPacket.dstAddr[8] ={0};我这样写编译不通过。。
rxPacket.dstAddr[8]在结构体里定义是一个8字节数组,一般用的时候短地址,就用一位,例程中也是这样的,比如目的地址为0xa4,地址可以这样写:
rxPacket.dstAddr[0] = 0xa4;
哦哦,原来是这样,谢谢
请问楼主 能做到数据的同时收发吗?
我现在只能是一个收 一个发 同时收发就会有问题,要么收数据有问题 要么发数据有问题。
芯片同一时间是不可能既收又发的,因为只有一根天线,分时来操作的,但是给用户的体验是收发同时实现。你同时收发估计是空中包有冲突,建议用Listen Before Talk例程做发送。
收发例程可以参考Wireless Sensor Network。
- The Wireless Sensor Network (WSN) Node and Concentrator examples illustrate how to create a very basic sensor network consisting of one or many Node device(s) and a Concentrator device. The example shows how to form a one-to-many network where the Nodes send messages to the Concentrator.
- The Node use the Sensor Controller Engine to periodically read the value of the light sensor.
- Whenever the sensor value change, the main controller wakes up and sends a packet with the value to the Concentrator.
- The Concentrator is always waiting for incoming packet.
- Once a packet is received, the Concentrator sends an acknowledgement packet in return and displays the data on an LCD (if the kit has one)
您好:
请问WSN concentrator中的sendack()也是用的listen bofore talk 例程吗?我用按键控制的事件发送信息显示传送失败,请问这是什么原因呢?
/*
* Copyright (c) 2015-2016, Texas Instruments Incorporated
* All rights reserved.
*
* Redistribution and use in source and binary forms, with or without
* modification, are permitted provided that the following conditions
* are met:
*
* * Redistributions of source code must retain the above copyright
* notice, this list of conditions and the following disclaimer.
*
* * Redistributions in binary form must reproduce the above copyright
* notice, this list of conditions and the following disclaimer in the
* documentation and/or other materials provided with the distribution.
*
* * Neither the name of Texas Instruments Incorporated nor the names of
* its contributors may be used to endorse or promote products derived
* from this software without specific prior written permission.
*
* THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS "AS IS"
* AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT LIMITED TO,
* THE IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR A PARTICULAR
* PURPOSE ARE DISCLAIMED. IN NO EVENT SHALL THE COPYRIGHT OWNER OR
* CONTRIBUTORS BE LIABLE FOR ANY DIRECT, INDIRECT, INCIDENTAL, SPECIAL,
* EXEMPLARY, OR CONSEQUENTIAL DAMAGES (INCLUDING, BUT NOT LIMITED TO,
* PROCUREMENT OF SUBSTITUTE GOODS OR SERVICES; LOSS OF USE, DATA, OR PROFITS;
* OR BUSINESS INTERRUPTION) HOWEVER CAUSED AND ON ANY THEORY OF LIABILITY,
* WHETHER IN CONTRACT, STRICT LIABILITY, OR TORT (INCLUDING NEGLIGENCE OR
* OTHERWISE) ARISING IN ANY WAY OUT OF THE USE OF THIS SOFTWARE,
* EVEN IF ADVISED OF THE POSSIBILITY OF SUCH DAMAGE.
*/
/***** Includes *****/
#include <xdc/std.h>
#include <xdc/runtime/System.h>
#include "ConcentratorRadioTask.h"
#include <ti/sysbios/BIOS.h>
#include <ti/sysbios/knl/Task.h>
#include <ti/sysbios/knl/Semaphore.h>
#include <ti/sysbios/knl/Event.h>
#include <driverlib/aon_batmon.h>
/* Drivers */
#include <ti/drivers/rf/RF.h>
#include <ti/drivers/PIN.h>
/* Board Header files */
#include "Board.h"
#include "easylink/EasyLink.h"
#include "RadioProtocol.h"
/***** Defines *****/
#define CONCENTRATORRADIO_TASK_STACK_SIZE 1024
#define CONCENTRATORRADIO_TASK_PRIORITY 3
#define RADIO_EVENT_ALL 0xFFFFFFFF
#define RADIO_EVENT_VALID_PACKET_RECEIVED (uint32_t)(1 << 0)
#define RADIO_EVENT_INVALID_PACKET_RECEIVED (uint32_t)(1 << 1)
#define CONCENTRATORRADIO_MAX_RETRIES 2
#define NORERADIO_ACK_TIMEOUT_TIME_MS (160)
#define CONCENTRATOR_ACTIVITY_LED Board_LED0
/***** Type declarations *****/
//add by me--begin
enum NodeRadioOperationStatus {
NodeRadioStatus_Success,
NodeRadioStatus_Failed,
NodeRadioStatus_FailedNotConnected,
};
struct RadioOperation {
EasyLink_TxPacket easyLinkTxPacket;
uint8_t retriesDone;
uint8_t maxNumberOfRetries;
uint32_t ackTimeoutMs;
enum NodeRadioOperationStatus result;
};
//add by me --end
/***** Variable declarations *****/
static Task_Params concentratorRadioTaskParams;
Task_Struct concentratorRadioTask; /* not static so you can see in ROV */
static uint8_t concentratorRadioTaskStack[CONCENTRATORRADIO_TASK_STACK_SIZE];
Event_Struct radioOperationEvent; /* not static so you can see in ROV */
static Event_Handle radioOperationEventHandle;
//add by me--begin
static struct DualModeSensorPacket dmSensorPacket;
static struct RadioOperation currentRadioOperation;
Event_Struct OperationEvent; /* not static so you can see in ROV */
static Event_Handle OperationEventHandle;
//add by me --end
static ConcentratorRadio_PacketReceivedCallback packetReceivedCallback;
static union ConcentratorPacket latestRxPacket;
static EasyLink_TxPacket txPacket;
static struct AckPacket ackPacket;
static uint8_t concentratorAddress;
static int8_t latestRssi;
/***** Prototypes *****/
static void concentratorRadioTaskFunction(UArg arg0, UArg arg1);
static void rxDoneCallback(EasyLink_RxPacket * rxPacket, EasyLink_Status status);
static void notifyPacketReceived(union ConcentratorPacket* latestRxPacket);
static void sendAck(uint8_t latestSourceAddress);
static void sendDmPacket(struct DualModeSensorPacket sensorPacket, uint8_t maxNumberOfRetries, uint32_t ackTimeoutMs);
void buttonCallback(PIN_Handle handle, PIN_Id pinId);
static void TxcontrolTaskFunction(UArg arg0, UArg arg1);
/* Pin driver handle */
static PIN_Handle ledPinHandle;
static PIN_State ledPinState;
//add by me--begin
/***** Defines *****/
#define TXCONTROL_TASK_STACK_SIZE 1024
#define TXCONTROL_TASK_PRIORITY 2
static Task_Params TxcontrolTaskParams;
Task_Struct TxcontrolTask; /* not static so you can see in ROV */
static uint8_t TxcontrolTaskStack[TXCONTROL_TASK_STACK_SIZE];
#define NODERADIO_MAX_RETRIES 2
#define NORERADIO_ACK_TIMEOUT_TIME_MS (160)
static PIN_Handle buttonPinHandle;
static PIN_State buttonPinState;
static uint32_t prevTicks;
//static uint8_t txevents= 0;
//add by me--end
/* Configure LED Pin */
PIN_Config ledPinTable[] = {
CONCENTRATOR_ACTIVITY_LED | PIN_GPIO_OUTPUT_EN | PIN_GPIO_LOW | PIN_PUSHPULL | PIN_DRVSTR_MAX, Board_LED1 | PIN_GPIO_OUTPUT_EN | PIN_GPIO_LOW | PIN_PUSHPULL | PIN_DRVSTR_MAX,//add by me Board_LED2 | PIN_GPIO_OUTPUT_EN | PIN_GPIO_LOW | PIN_PUSHPULL | PIN_DRVSTR_MAX,//add by me Board_LED3 | PIN_GPIO_OUTPUT_EN | PIN_GPIO_LOW | PIN_PUSHPULL | PIN_DRVSTR_MAX,//add by me
PIN_TERMINATE
};
//add by me --begin
PIN_Config buttonPinTable[] = {
Board_BUTTON0 | PIN_INPUT_EN | PIN_PULLUP | PIN_IRQ_NEGEDGE,
Board_BUTTON1 | PIN_INPUT_EN | PIN_PULLUP | PIN_IRQ_NEGEDGE,
Board_BUTTON2 | PIN_INPUT_EN | PIN_PULLUP | PIN_IRQ_NEGEDGE,
Board_BUTTON3 | PIN_INPUT_EN | PIN_PULLUP | PIN_IRQ_NEGEDGE,
Board_BUTTON4 | PIN_INPUT_EN | PIN_PULLUP | PIN_IRQ_NEGEDGE,
PIN_TERMINATE
};
//add by me--end
/***** Function definitions *****/
void ConcentratorRadioTask_init(void) {
/* Open LED pins */
ledPinHandle = PIN_open(&ledPinState, ledPinTable);
if (!ledPinHandle)
{
System_abort("Error initializing board 3.3V domain pins\n");
}
buttonPinHandle = PIN_open(&buttonPinState, buttonPinTable);
if (!buttonPinHandle)
{
System_abort("Error initializing button pins\n");
}
/* Create event used internally for state changes */
Event_Params eventParam;
Event_Params_init(&eventParam);
Event_construct(&radioOperationEvent, &eventParam);
radioOperationEventHandle = Event_handle(&radioOperationEvent);
Event_construct(&OperationEvent, &eventParam);
OperationEventHandle = Event_handle(&OperationEvent);
/* Create the concentrator radio protocol task */
Task_Params_init(&concentratorRadioTaskParams);
concentratorRadioTaskParams.stackSize = CONCENTRATORRADIO_TASK_STACK_SIZE;
concentratorRadioTaskParams.priority = CONCENTRATORRADIO_TASK_PRIORITY;
concentratorRadioTaskParams.stack = &concentratorRadioTaskStack;
Task_construct(&concentratorRadioTask, concentratorRadioTaskFunction, &concentratorRadioTaskParams, NULL);
/* Create the concentrator radio protocol task */
Task_Params_init(&TxcontrolTaskParams);
TxcontrolTaskParams.stackSize = TXCONTROL_TASK_STACK_SIZE;
TxcontrolTaskParams.priority = TXCONTROL_TASK_PRIORITY;
TxcontrolTaskParams.stack = &TxcontrolTaskStack;
Task_construct(&TxcontrolTask, TxcontrolTaskFunction, &TxcontrolTaskParams, NULL);
}
void ConcentratorRadioTask_registerPacketReceivedCallback(ConcentratorRadio_PacketReceivedCallback callback) {
packetReceivedCallback = callback;
}
static void concentratorRadioTaskFunction(UArg arg0, UArg arg1)
{
/* Initialize EasyLink */
if(EasyLink_init(RADIO_EASYLINK_MODULATION) != EasyLink_Status_Success) {
System_abort("EasyLink_init failed");
}
/* Set frequency */
if(EasyLink_setFrequency(RADIO_FREQUENCY) != EasyLink_Status_Success) {
System_abort("EasyLink_setFrequency failed");
}
/* Set concentrator address */;
concentratorAddress = RADIO_CONCENTRATOR_ADDRESS;
EasyLink_enableRxAddrFilter(&concentratorAddress, 1, 1);
/* Set up Ack packet */
ackPacket.header.sourceAddress = concentratorAddress;
ackPacket.header.packetType = RADIO_PACKET_TYPE_ACK_PACKET;
/* Enter receive */
if(EasyLink_receiveAsync(rxDoneCallback, 0) != EasyLink_Status_Success) {
System_abort("EasyLink_receiveAsync failed");
}
while (1) {
uint32_t events = Event_pend(radioOperationEventHandle, 0, RADIO_EVENT_ALL, BIOS_WAIT_FOREVER);
/* If valid packet received */
if(events & RADIO_EVENT_VALID_PACKET_RECEIVED) {
/* Send ack packet */
sendAck(latestRxPacket.header.sourceAddress);
/* Call packet received callback */
notifyPacketReceived(&latestRxPacket);
/* Go back to RX */
if(EasyLink_receiveAsync(rxDoneCallback, 0) != EasyLink_Status_Success) {
System_abort("EasyLink_receiveAsync failed");
}
/* toggle Activity LED */
PIN_setOutputValue(ledPinHandle, CONCENTRATOR_ACTIVITY_LED,
!PIN_getOutputValue(CONCENTRATOR_ACTIVITY_LED));
}
/* If invalid packet received */
if(events & RADIO_EVENT_INVALID_PACKET_RECEIVED) {
/* Go back to RX */
if(EasyLink_receiveAsync(rxDoneCallback, 0) != EasyLink_Status_Success) {
System_abort("EasyLink_receiveAsync failed");
}
}
}
}
static void TxcontrolTaskFunction(UArg arg0, UArg arg1){
/* Setup ADC sensor packet */
// dmSensorPacket.header.sourceAddress = RADIO_CONCENTRATOR_ADDRESS;
dmSensorPacket.header.sourceAddress =1;
dmSensorPacket.header.packetType = RADIO_PACKET_TYPE_DM_SENSOR_PACKET;
/* Initialise previous Tick count used to calculate uptime for the TLM beacon */
prevTicks = Clock_getTicks();
dmSensorPacket.batt = AONBatMonBatteryVoltageGet();
dmSensorPacket.button = !PIN_getInputValue(Board_BUTTON0);
dmSensorPacket.time100MiliSec=prevTicks;
/* Setup callback for button pins */
if (PIN_registerIntCb(buttonPinHandle, &buttonCallback) != 0)
{
System_abort("Error registering button callback function");
}
while(1)
{
uint32_t txevents = Event_pend(OperationEventHandle, 0, RADIO_EVENT_ALL, BIOS_WAIT_FOREVER);
if(txevents & RADIO_EVENT_VALID_PACKET_RECEIVED)
{
sendDmPacket(dmSensorPacket, NODERADIO_MAX_RETRIES, NORERADIO_ACK_TIMEOUT_TIME_MS);
/* toggle Activity LED */
PIN_setOutputValue(ledPinHandle, CONCENTRATOR_ACTIVITY_LED,
!PIN_getOutputValue(CONCENTRATOR_ACTIVITY_LED));
//txevents=0;
}
}
}
static void sendAck(uint8_t latestSourceAddress) {
/* Set destinationAdress, but use EasyLink layers destination adress capability */
txPacket.dstAddr[0] = latestSourceAddress;
/* Copy ACK packet to payload, skipping the destination adress byte.
* Note that the EasyLink API will implcitily both add the length byte and the destination address byte. */
memcpy(txPacket.payload, &ackPacket.header, sizeof(ackPacket));
txPacket.len = sizeof(ackPacket);
/* Send packet */
if (EasyLink_transmit(&txPacket) != EasyLink_Status_Success)
{
System_abort("EasyLink_transmit failed");
}
}
static void notifyPacketReceived(union ConcentratorPacket* latestRxPacket)
{
if (packetReceivedCallback)
{
packetReceivedCallback(latestRxPacket, latestRssi);
}
}
static void rxDoneCallback(EasyLink_RxPacket * rxPacket, EasyLink_Status status)
{
union ConcentratorPacket* tmpRxPacket;
/* If we received a packet successfully */
if (status == EasyLink_Status_Success)
{
/* Save the latest RSSI, which is later sent to the receive callback */
latestRssi = (int8_t)rxPacket->rssi;
/* Check that this is a valid packet */
tmpRxPacket = (union ConcentratorPacket*)(rxPacket->payload);
/* If this is a known packet */
if (tmpRxPacket->header.packetType == RADIO_PACKET_TYPE_ADC_SENSOR_PACKET)
{
/* Save packet */
memcpy((void*)&latestRxPacket, &rxPacket->payload, sizeof(struct AdcSensorPacket));
/* Signal packet received */
Event_post(radioOperationEventHandle, RADIO_EVENT_VALID_PACKET_RECEIVED);
}
else if (tmpRxPacket->header.packetType == RADIO_PACKET_TYPE_DM_SENSOR_PACKET)
{
/* Save packet */
memcpy((void*)&latestRxPacket, &rxPacket->payload, sizeof(struct DualModeSensorPacket));
/* Signal packet received */
Event_post(radioOperationEventHandle, RADIO_EVENT_VALID_PACKET_RECEIVED);
}
else
{
/* Signal invalid packet received */
Event_post(radioOperationEventHandle, RADIO_EVENT_INVALID_PACKET_RECEIVED);
}
}
else
{
/* Signal invalid packet received */
Event_post(radioOperationEventHandle, RADIO_EVENT_INVALID_PACKET_RECEIVED);
}
}
void buttonCallback(PIN_Handle handle, PIN_Id pinId)
{
/* Debounce logic, only toggle if the button is still pushed (low) */
// CPUdelay(8000*50);
if (PIN_getInputValue(Board_BUTTON0) == 0) {
CPUdelay(8000*50);
Event_post(OperationEventHandle, RADIO_EVENT_VALID_PACKET_RECEIVED);
// txevents=1; PIN_setOutputValue(ledPinHandle, Board_LED1,!PIN_getOutputValue(Board_LED1));
} if (PIN_getInputValue(Board_BUTTON1) == 0) {
PIN_setOutputValue(ledPinHandle, Board_LED2,!PIN_getOutputValue(Board_LED2));
} if (PIN_getInputValue(Board_BUTTON2) == 0) {
PIN_setOutputValue(ledPinHandle, Board_LED3,!PIN_getOutputValue(Board_LED3));
} if (PIN_getInputValue(Board_BUTTON3) == 0) {
PIN_setOutputValue(ledPinHandle, Board_LED3,!PIN_getOutputValue(Board_LED3));
} if (PIN_getInputValue(Board_BUTTON4) == 0) { PIN_setOutputValue(ledPinHandle, Board_LED3,!PIN_getOutputValue(Board_LED3));
}
}
static void sendDmPacket(struct DualModeSensorPacket sensorPacket, uint8_t maxNumberOfRetries, uint32_t ackTimeoutMs)
{
/* Set destination address in EasyLink API */
currentRadioOperation.easyLinkTxPacket.dstAddr[0] = 0;
/* Copy ADC packet to payload
* Note that the EasyLink API will implcitily both add the length byte and the destination address byte. */
memcpy(currentRadioOperation.easyLinkTxPacket.payload, ((uint8_t*)&dmSensorPacket), sizeof(struct DualModeSensorPacket));
currentRadioOperation.easyLinkTxPacket.len = sizeof(struct DualModeSensorPacket);
/* Setup retries */
currentRadioOperation.maxNumberOfRetries = maxNumberOfRetries;
currentRadioOperation.ackTimeoutMs = ackTimeoutMs;
currentRadioOperation.retriesDone = 0;
EasyLink_setCtrl(EasyLink_Ctrl_AsyncRx_TimeOut, EasyLink_ms_To_RadioTime(ackTimeoutMs));
/* Send packet */
if (EasyLink_transmit(¤tRadioOperation.easyLinkTxPacket) != EasyLink_Status_Success)
{
System_abort("EasyLink_transmit failed");
}
/* Enter RX */
if (EasyLink_receiveAsync(rxDoneCallback, 0) != EasyLink_Status_Success)
{
System_abort("EasyLink_receiveAsync failed");
}
}