LabVIEW使用机器人模块的inverse kinematic for puma 560转换成自己的机械臂?
时间:10-02
整理:3721RD
点击:
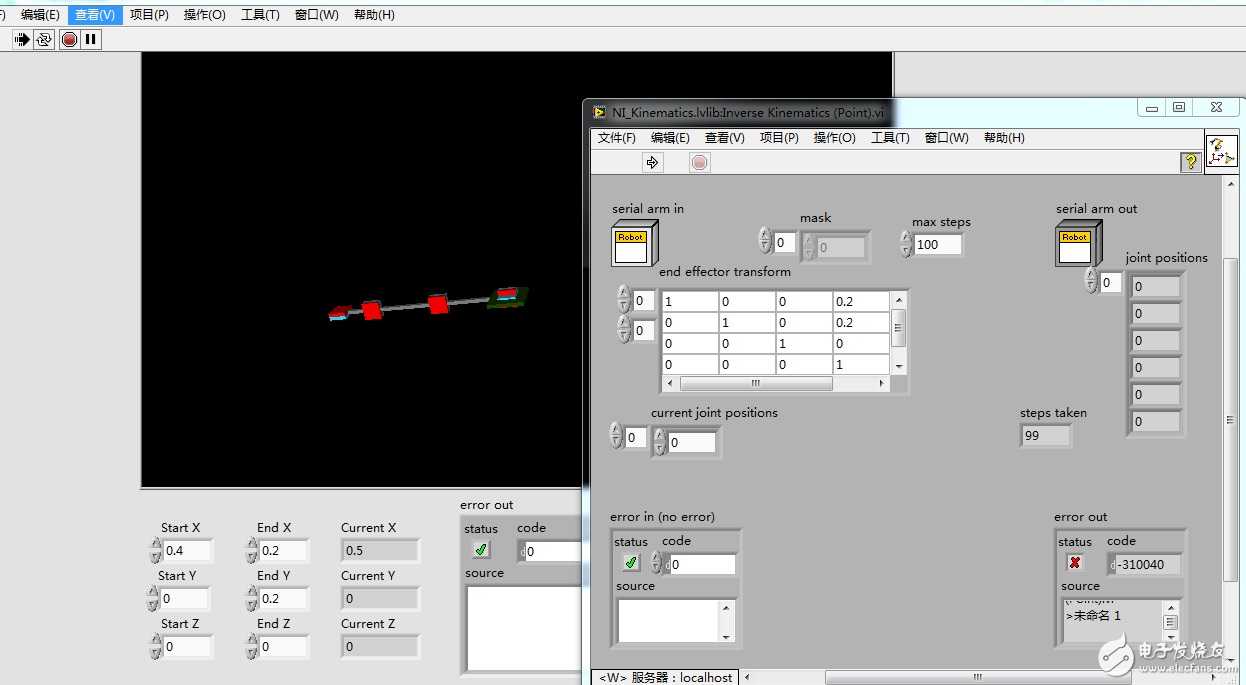
我想修改这个例程,我自己建立的机械臂模型是正确的,但是反解角度总是出现错误,到时图形显示不出来?求怎么解决?
反解程序报错图
有点意思。不过我看不懂这是啥。
我也搞不懂例程里面是怎么样个反解思路
回去研究一下,好高大上