最近忙于打造FPGA版WALL-E 瓦力机器人 绝对原创 绝对极客!
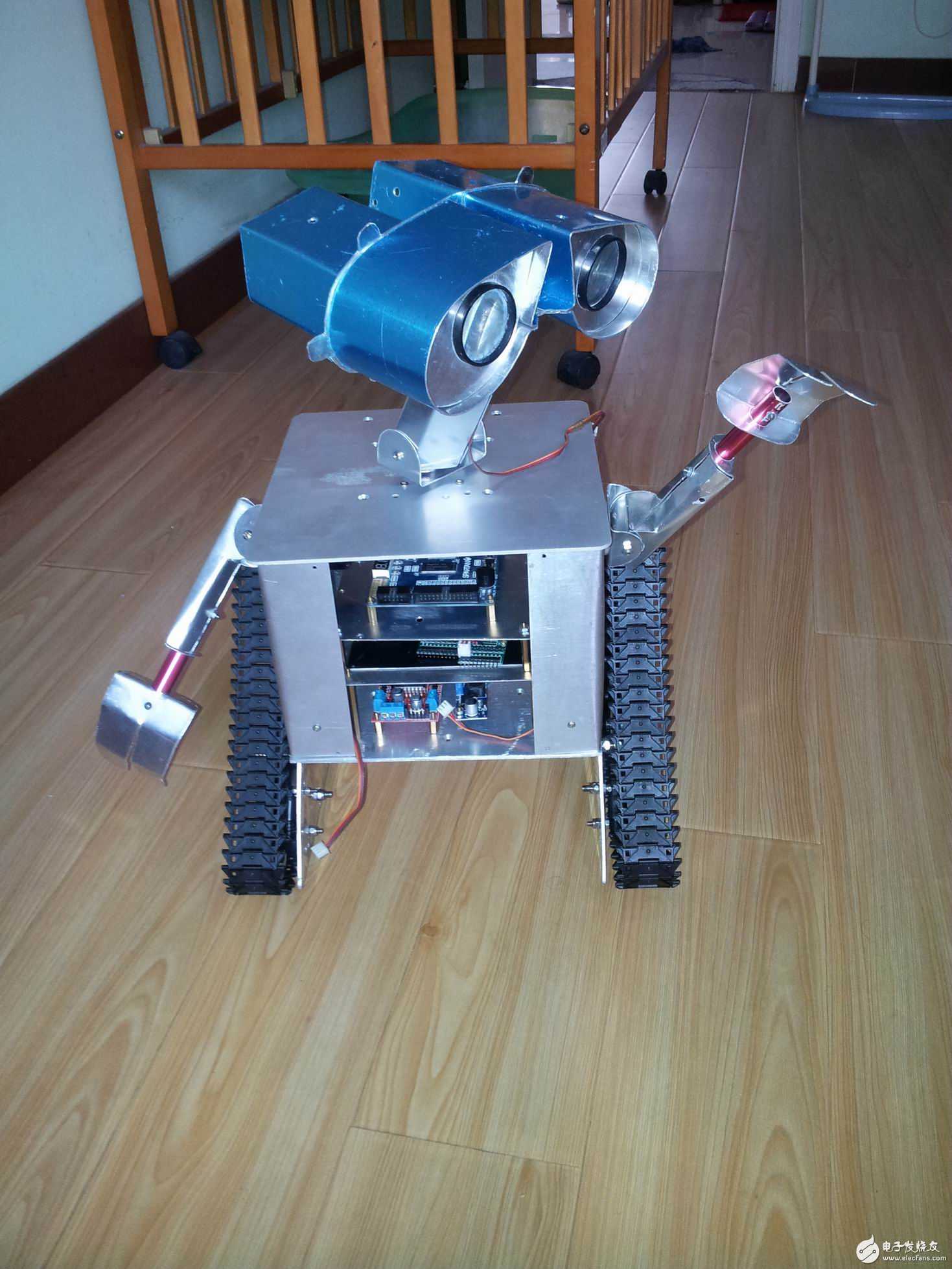
最近忙于打造FPGA版WALL-E 瓦力机器人,以前也搞过些简单的机器人,但都不是很满意,所以决心打造一款经典的机器人,那就是机器人总动员中的瓦力了。霹雳5号结构有点复杂,不好安装内部设备,难度太大。
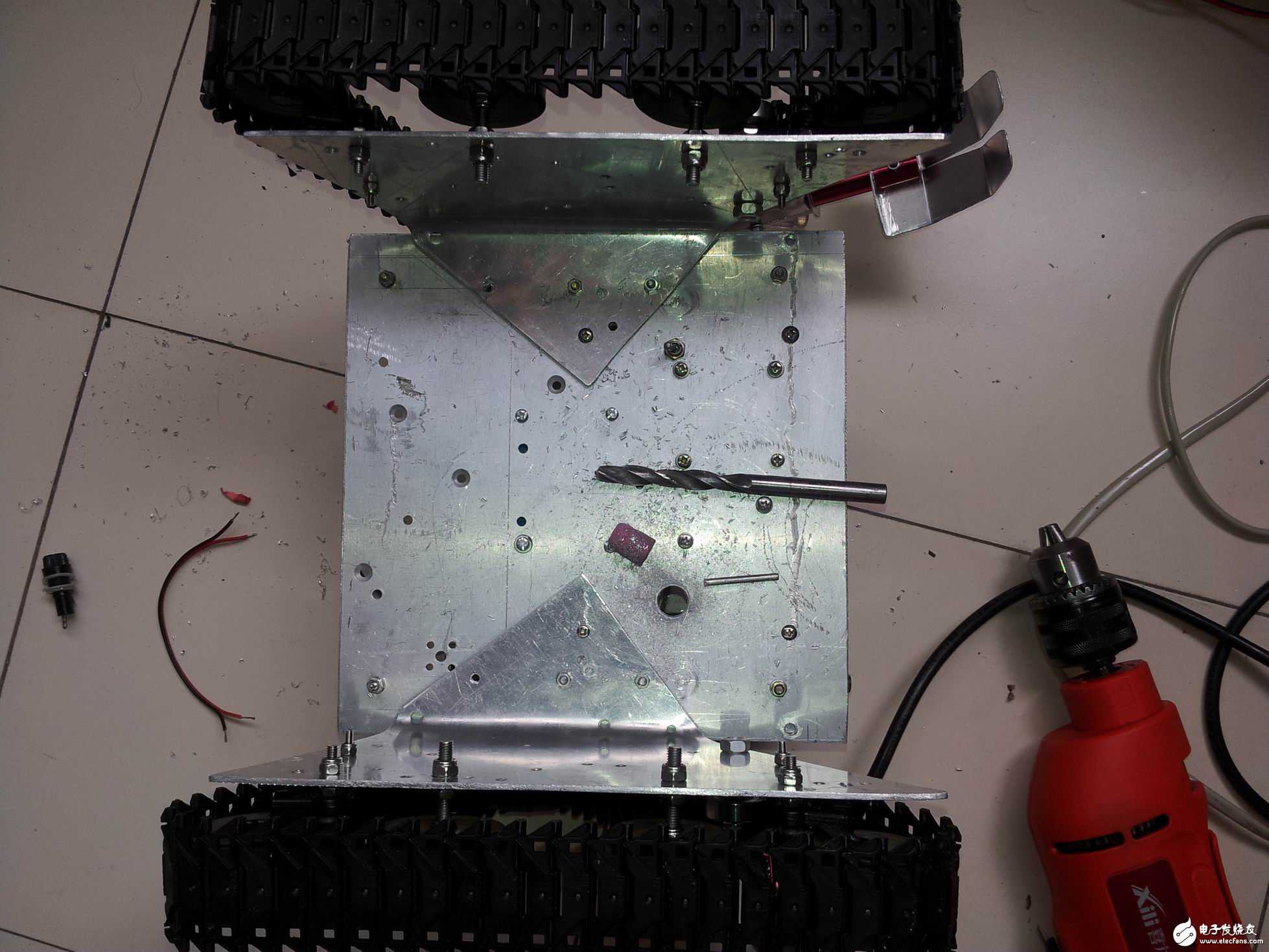
这个机器人分三大块任务,一是机身结构部分的制作,二是电路方面的设计,三是FPGA程序方面的设计。机械结构搞了个月了,买了好多工具及配件。结构还没有弄完。
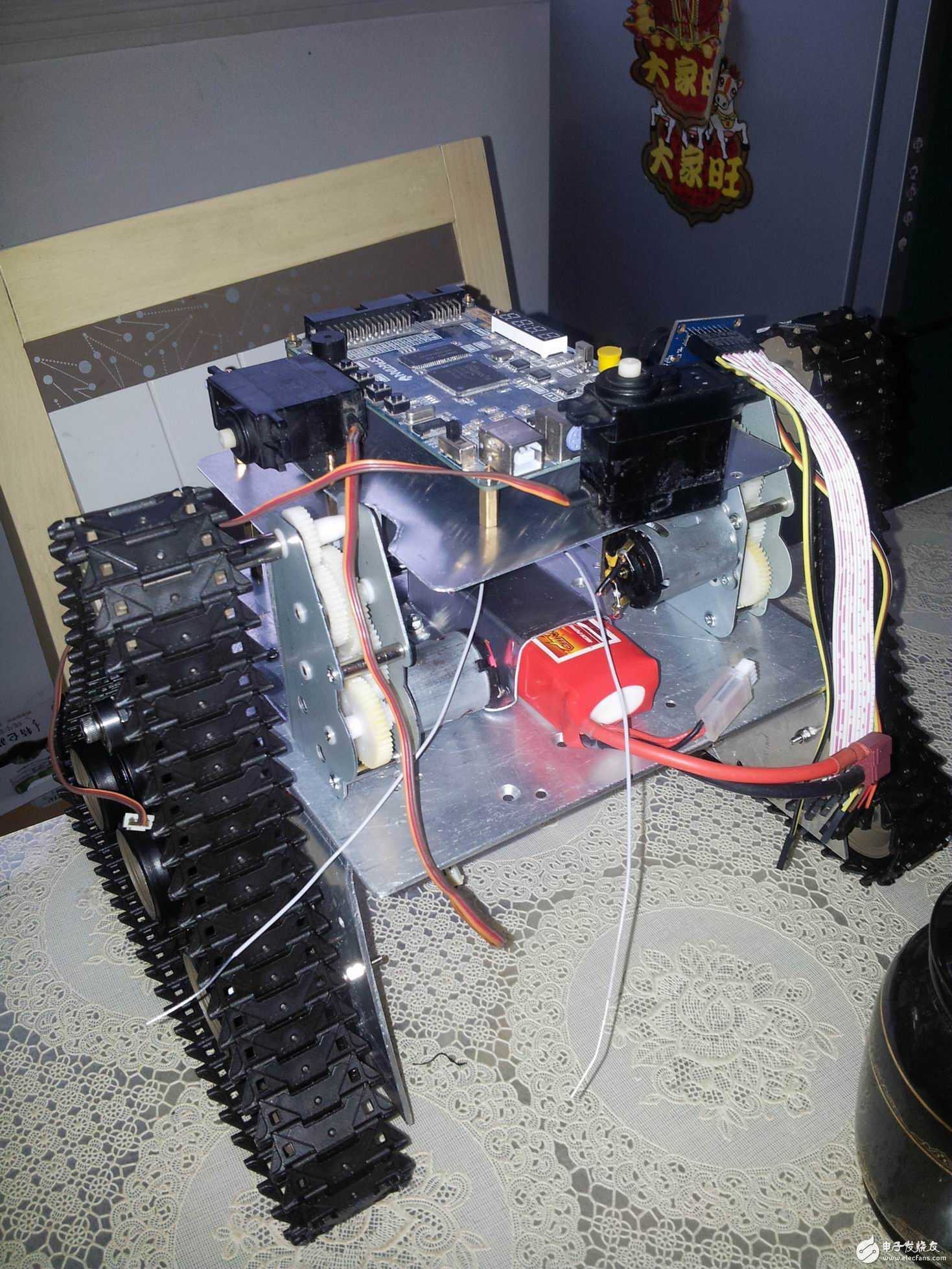
先发点图片给大家看看,等全部搞完再拍照片和视频。
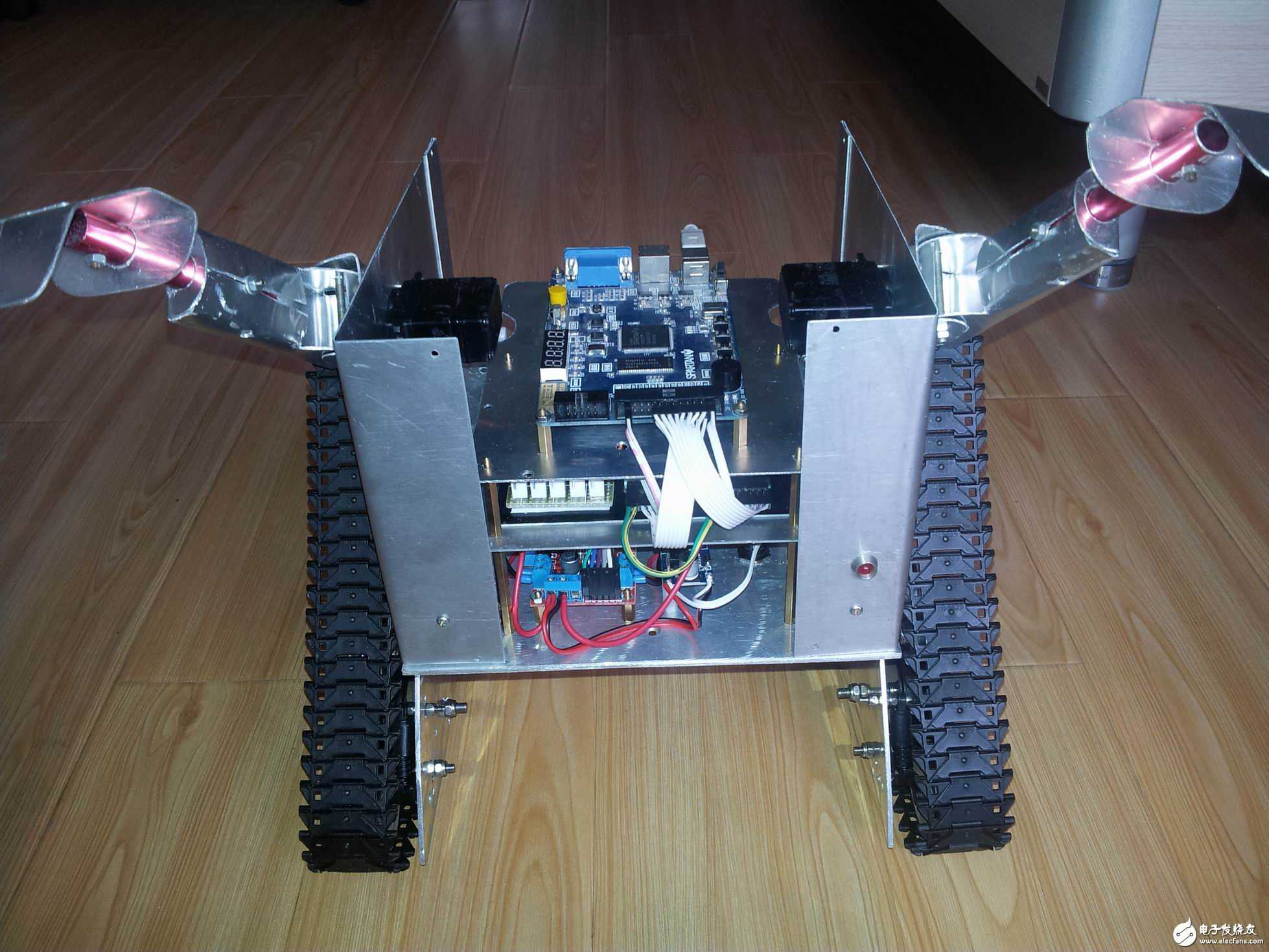
大概说下这个机器人怎么工作的,首先我手头有华科尔DEVO10遥控器及10通道接收,还有有一块XILINX公司的Spartan6系列的XC6SLX9芯片开发板,将接收连接到开发板IO口上,通过FPGA解码各通道PPM信号,进而控制电机驱动模块,及头部 手臂舵机模块。通过遥控器控制机器人油门 左右转圈,头部动作及手臂动作。做好再详细说了。
先发点照片给大家看看,外壳加工实在麻烦,什么都要自己手工搞。

























FPGA版WALL-E 瓦力机器人电路部分介绍
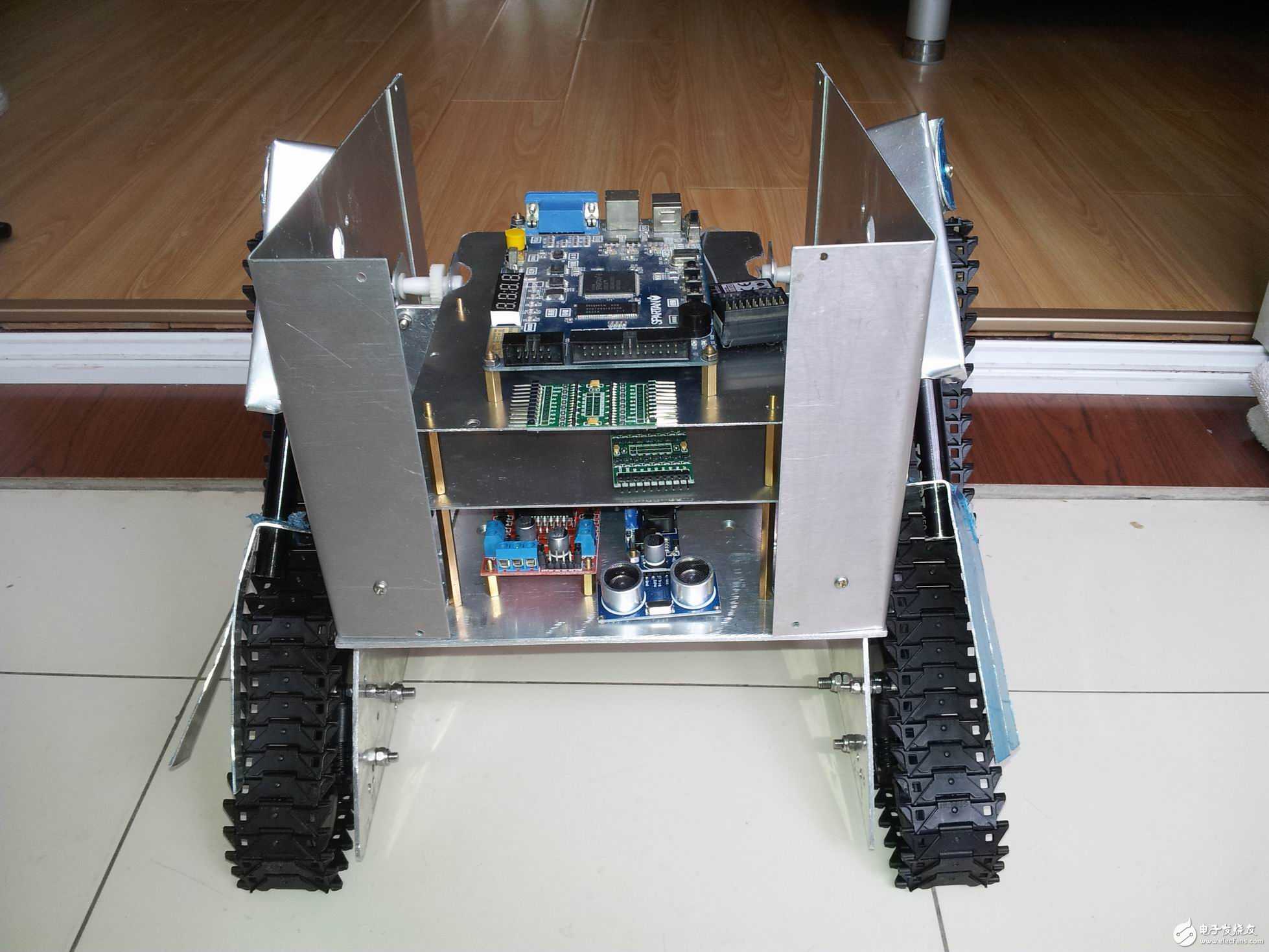
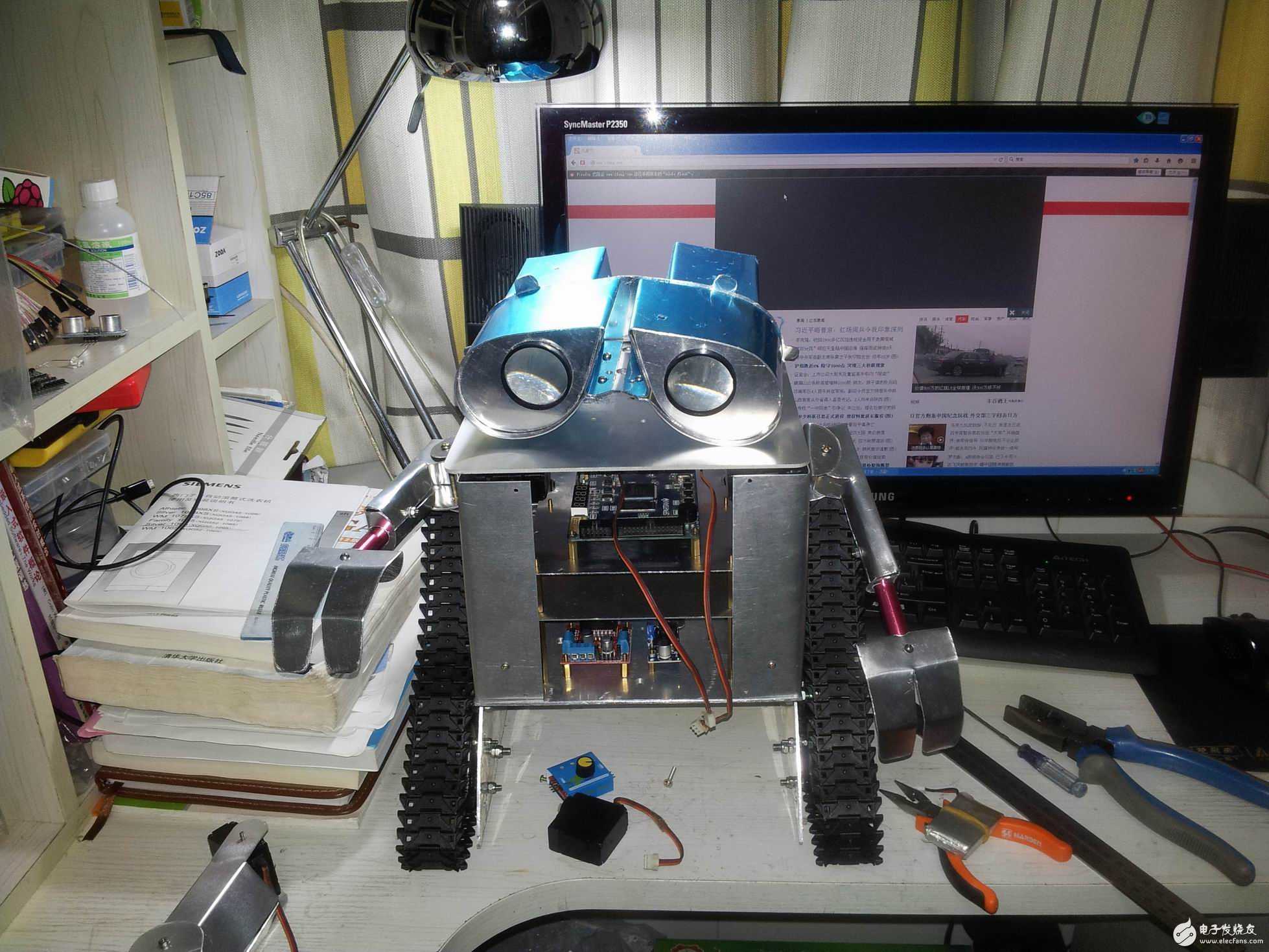
这些天业余时间继续制作瓦力机器人,搞死人了,外壳机械部分还没有完全做好,头部还要加工和打磨,身体前后部分还有面板要设计加工,顶上的面板还没有固定,还要打孔,保险丝和电源开关还要打孔,最后估计还要喷漆,想想还有好多工序,烦人。想想先不做外壳了,先把机器人内部的硬件电路搞好吧。外壳以后再慢慢弄。
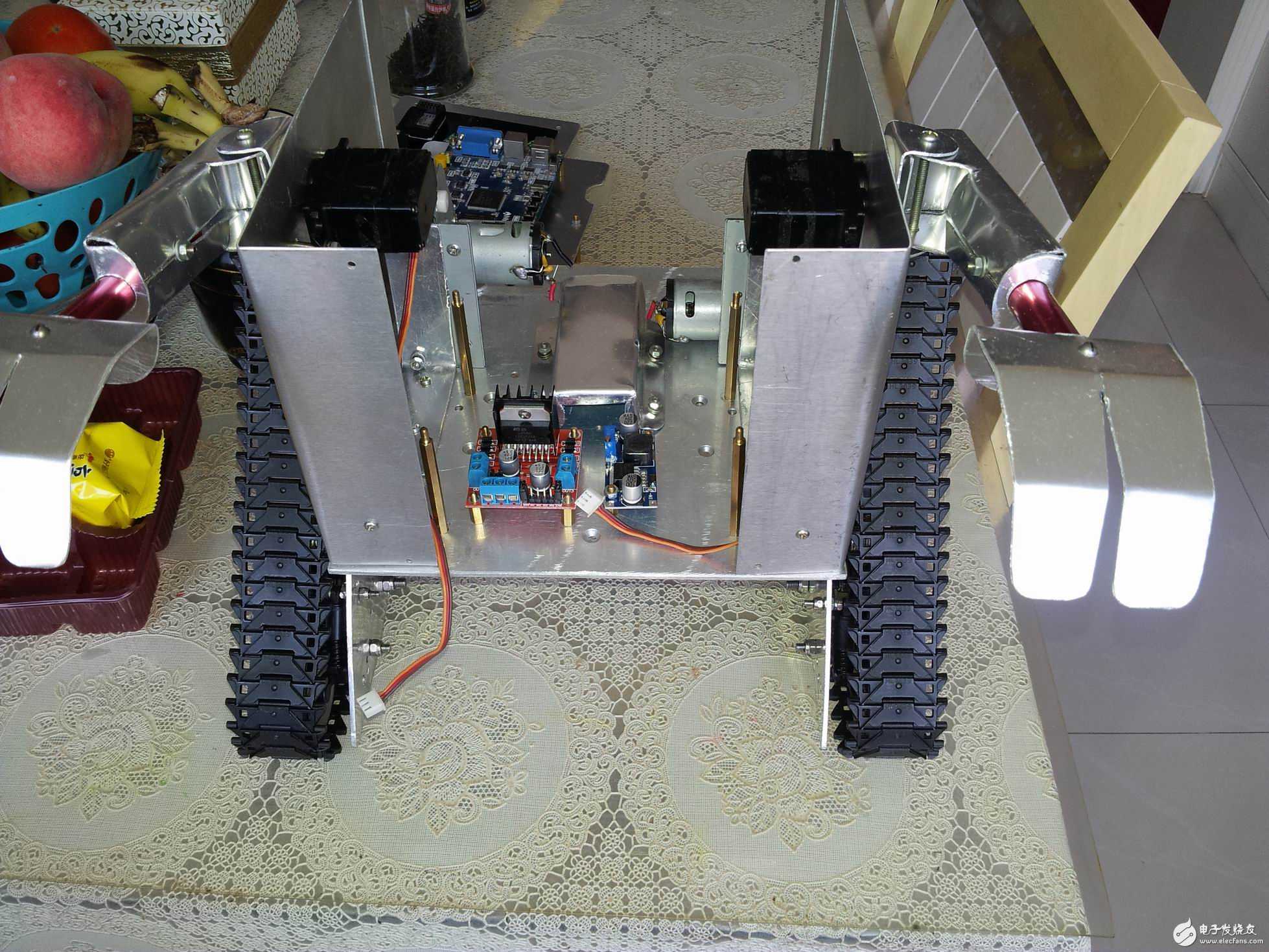
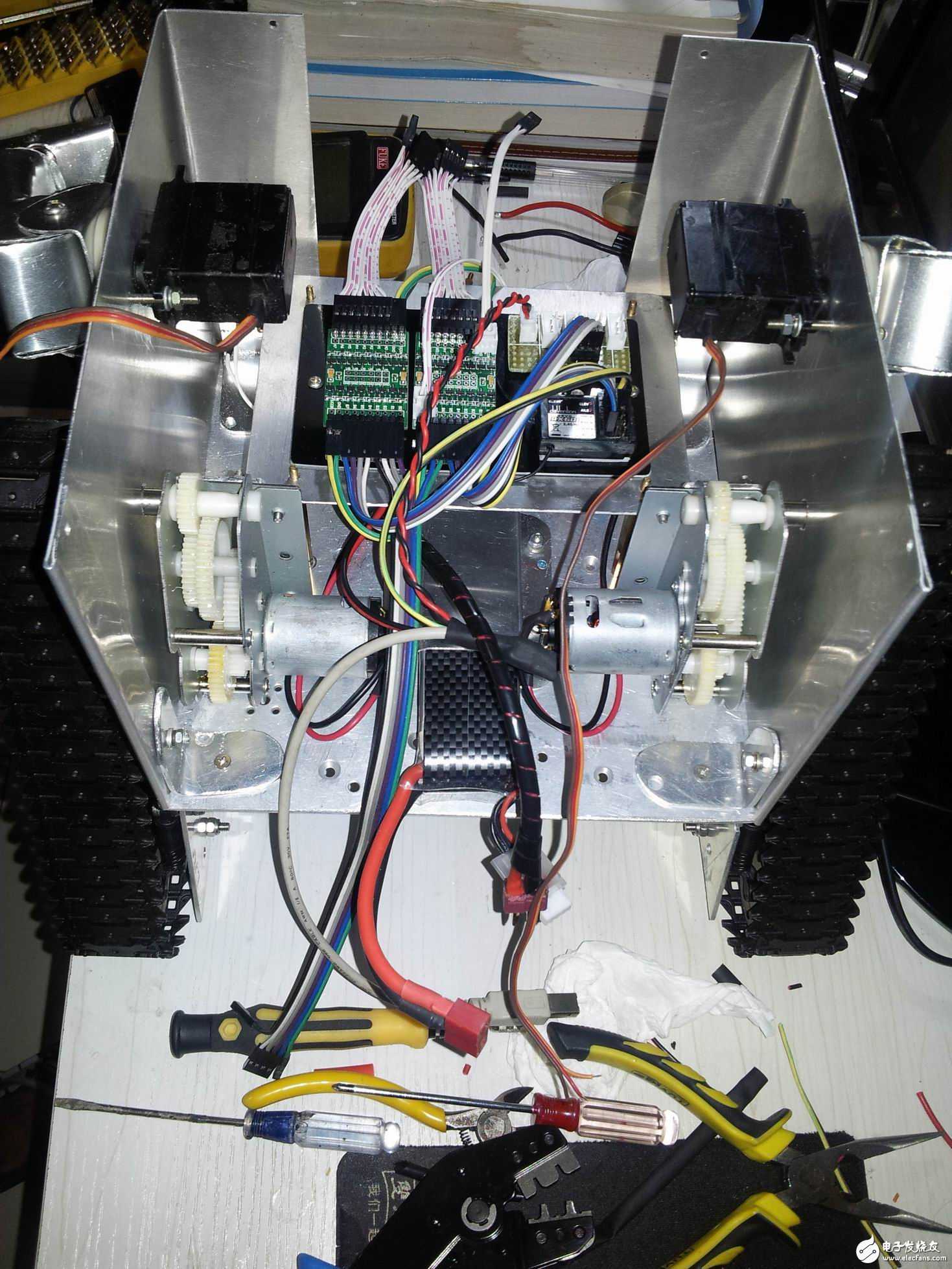
先大概介绍一下机器人硬件电路的组成部分:
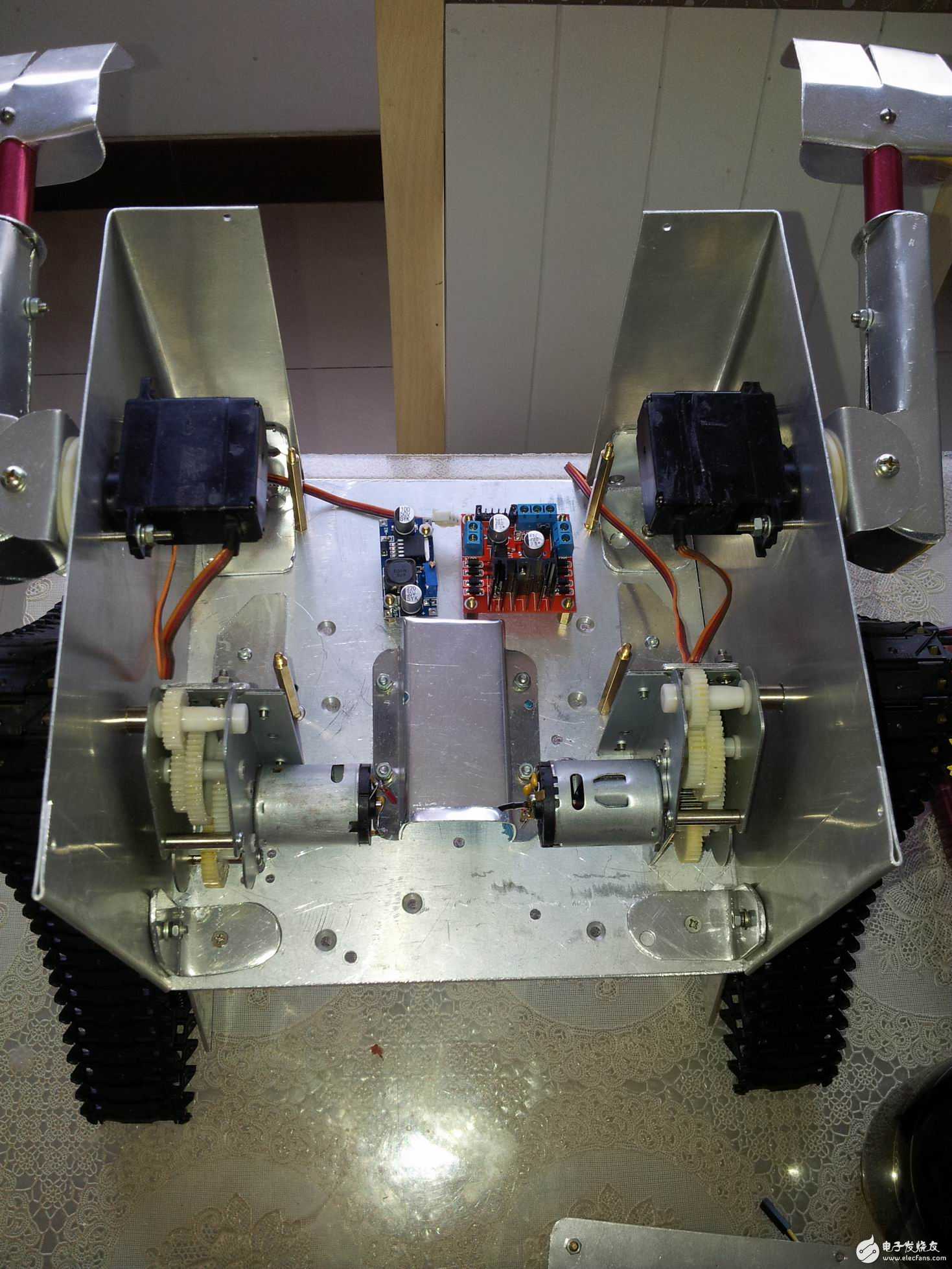
1:机器人履带驱动,是2个带减速齿轮的直流电机,左右一边一个,驱动是现成的L298模块。
2:机器人手臂驱动,是2个模拟舵机,好多年前买的,是在别的机器人上拆下来的。
3:机器头部俯仰,转向驱动,同上也是2个模拟舵机,转向,俯仰控制各一个。
4:遥控接收装置,华科尔RX601,6通接收机,原来一直用在我的山寨450直升机上的,因为飞机已经2次飞掉水里了,接收都进水拆开晒干了,为了安全干脆把不用的RX1002接收换上,RX601正好安装在瓦力身上,失控也砸不到人。
5:机器人遥控器,就是华科尔D10了,可以遥控直升机,又能控制瓦力。油门通道控制前进或者后退的速度,方向通道控制原地左转或右转,升降与副翼通道控制头部俯仰与转向。还有起落架与辅助1分别控制左右手臂上下动作。D10左边右边正好有2个旋钮,设置下遥控器就可以了。
6:电源装置:使用现成的450直升机的3S锂电池,5V电源的产生使用网购的稳压模块。
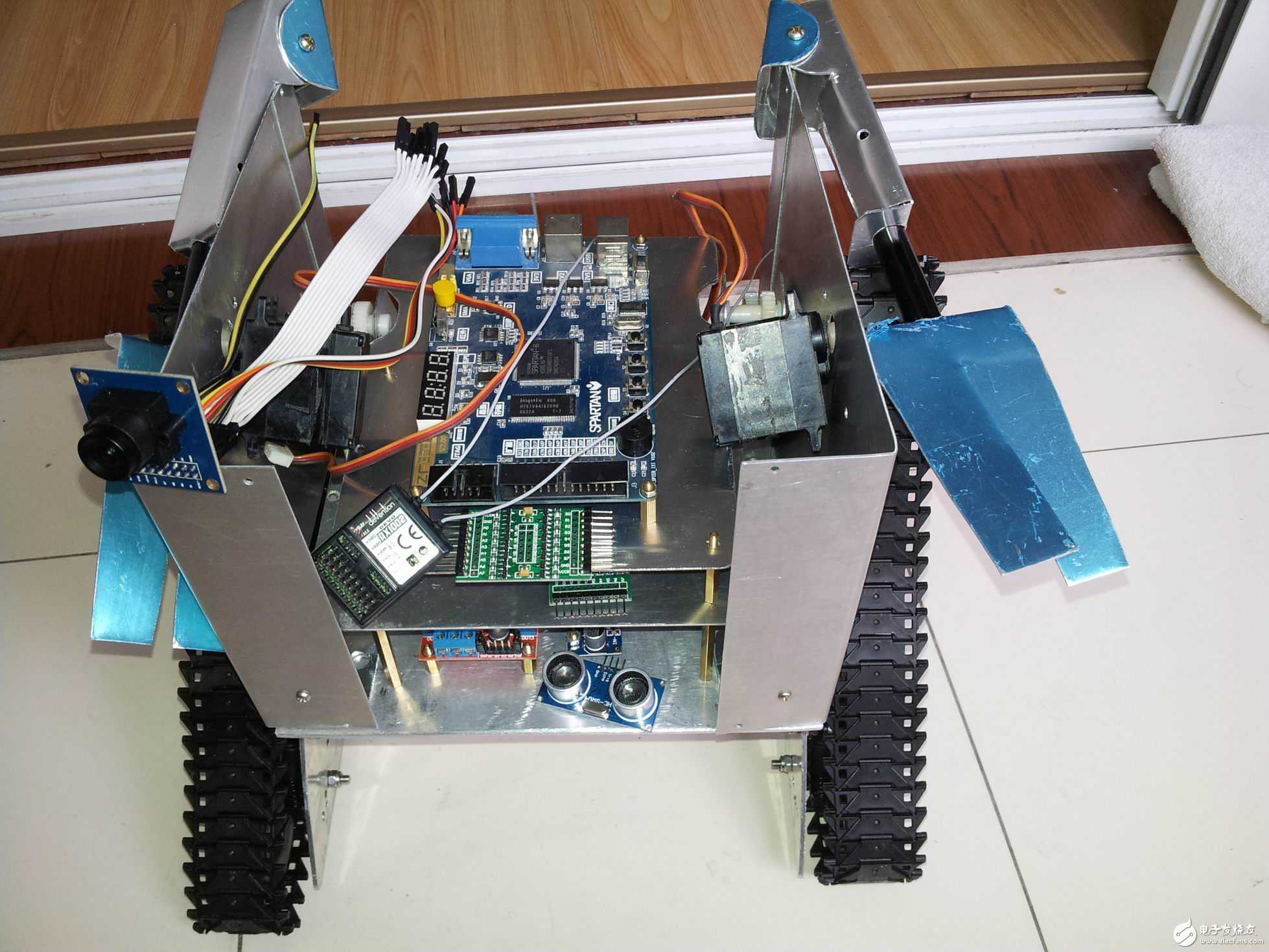
7:控制核心:Xilinx公司的Spartan6系列的XC6SLX9 FPGA芯片。是块完整的FPGA开发板板,留有IO扩展口,编程口,接上5V电源就能工作,板上还有好多资源没有使用,数码管,串口,按钮,AD转换芯片,SDRAM,红外遥控等,都是做实验用的。
8:辅助设备,FPGA的IO口逻辑电压是3.3V的,RX601,L298模块,舵机模块逻辑电压都是5V的,需要转换,网购2块8路信号转换器,完成3.3V和5V之间的转换,
此外还需要T插电源接头,保险丝,电源开关,电源指示灯,排线接插件等小配件。
以上大概就是全部硬件的情况了。此外我还有一个超声波测距模块和OV7670摄像头模块,等以后看能不能也加上去,做点简单的图像采集与处理。让瓦力自动跟踪运动目标等等,头跟踪移动目标应该挺有趣。
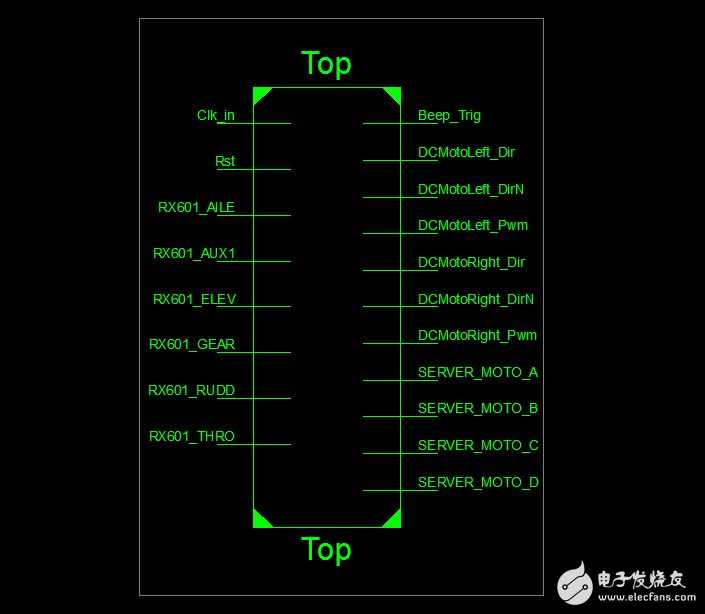
现在瓦力就是个遥控机器人,控制流程大概是这样:遥控器把摇杆旋钮等控制信号传給接收机,接收机每个通道都是脉冲宽度调制信号,这些信号通过逻辑转换电路送入FPGA的管脚,FPGA的内部硬件程序解码各通道脉冲宽度调制信号,产生一个对应的数值,通过这个数值,可以再产生舵机的驱动信号。也可以产生L298模块的控制信号。
进而控制瓦力各部分运动。
制作这个电路需要的工具:
A:制作排线接插件,需要压线钳,杜邦插头, 杜邦插头外壳,排线等
B:焊接工具,电烙铁,焊锡丝,松香,热缩套管等
C:测试工具,至少要个万用表,有条件示波器,逻辑分析仪。
D:辅助工具:斜口钳,尖嘴钳,螺丝刀,打火机,手电筒,双面胶,扎带,缠线管等
我感觉制作电路这部分工作和外壳制作与FPGA程序设计应该是最容易的,只要接对就不会出问题,按部就班把线接好焊好就OK了。之前可以在纸上先画点草图,做到心中有数。要做不少排线,特地买了把压线钳,和杜邦及2.54插头,自己就可以压线了。
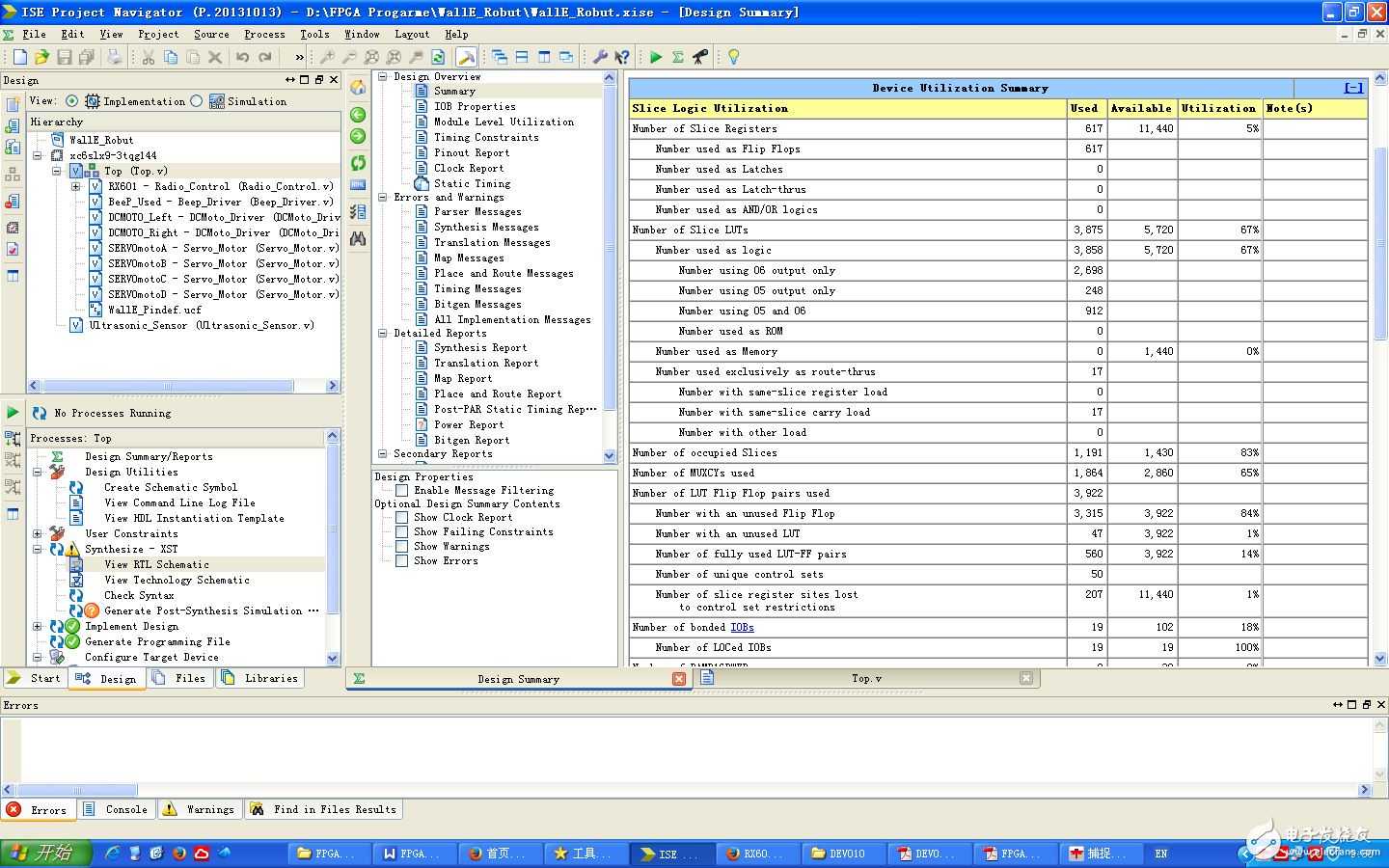
FPGA程序差不多搞好了,现在就头部转向有点问题,不受遥控器副翼控制,不知道是遥控器设置问题,还是FPGA程序问题,还要查查
这几天没事继续打磨瓦力,在侧面面板安装了一个USB充电接口,可以给小直升机电池充电,也可以给手机充电,不然航模3S锂电池电用不完要使用充电器放电。把瓦力脑袋也加工加工,应该还可以再加点东西上去,做的更像真一些,等有空再说,还拍了完整的视频,头部也可以正常活动了。原来头部不能被副翼摇杆控制转动,不是FPGA程序和遥控器设置的问题,是连接接收器与电平转换模块的线断了一条,害的我查了好几天。
以下是视频链接:FPGA版WALL-E瓦力机器人_第一部
FPGA版WALL-E瓦力机器人_第二部
FPGA版WALL_E瓦力机器人_第三部






FPGA瓦力头部运动与底盘履带悬挂极限运动视频,疯狂的瓦力呵呵,油门推到底就跑这么快,履带悬挂还有点作用,至少没有出现把履带跑掉下来的情况。
瓦力运动极限视频
履带悬挂极限视频
今天完成瓦力的最后一道工序,就是喷漆,在路边五金店买了2瓶自喷漆,一瓶灰色,一瓶黄色,只有这个颜色最相近了,也没有其它颜色可选了,先喷出来看看效果,不行以后有空再改良。弄好看点放在家里可以当静态仿真模型看。从6月16号开始买曲线锯和坦克履带以及驱动器等。到现在快2个月了,总算告一段落了。拍照片做点记录。上半年打造瓦力,下半年不知道搞点什么好?应该换个更好的工作,多挣点钱。等钱多了可以打造更复杂的东西。前段时间去德国大陆公司面试,做汽车仪表嵌入式软件,使用小日本的什么瑞萨单片机,C语言考试没有考好,英语也太烂,没有成功,到什么鸟公司都要考试,呵呵。不过这个公司在智联招聘上的招聘广告一直没有停过,估计是留不住人,或是其它什么情况,要是这样不去也好。下半年继续努力,总会找到合适的。







喷漆后的瓦力视频及照片:
喷漆后瓦力视频1:http://v.youku.com/v_show/id_XMTMwNTc2NTY0OA==.html
喷漆后瓦力视频2:http://v.youku.com/v_show/id_XMTMwNTc2NjQ4OA==.html
喷漆后瓦力照片,太新了弄破点可能会好看点:





上班比较闲,上传几张写了名字的瓦力:





太high了
太high了
帅帅帅帅!
这就是我们这个群体的爱好
我只能说小编简直是太厉害,崇拜死你了
牛 牛 牛 牛
小编简直是太厉害le
叼的不行.手臂和头部能伸缩就更像了
神人啊,小编。
牛叉,,,大神
厉害着呢!
666666666666666,真棒
牛 牛 牛 牛
干得漂亮!小编好样的!
绝对赞
顶小编
好厉害
不得不佩服的五体投地!太强了!
大神啊,我崇拜你啊,太潮流了
难道目前没有人在玩这款芯片了?
很牛,不过太贵了
今天要把瓦力的头部重新手工打磨加工一下,原来只是临时安装一下,顺带拍了瓦力裸奔视频。头部没有安装呵呵。
视频链接:瓦力机器人FPGA版瓦力机器人视频,裸奔视频呵呵。







太牛了!人才,我们一起干吧
重复了删除AAAAAAAAAAAAAAAAAAAAAAA







小编这也 太屌了吧
FPGA版瓦力视频链接第一部,fpga版瓦力视频链接光是底盘和手臂动作:
有视频就更好的了
顶起,好厉害啊啊
叼的不行.手臂和头部能伸缩就更像了
真正大神啊。
这么大一家伙
6666666,小编大神!
一个字 吊 吊 太调了 牛牛
太牛了,支持一下
太棒了,狂赞!
要是使用arm就可以更多的功能了。
这几天没事继续打磨瓦力,在侧面面板安装了一个USB充电接口,可以给小直升机电池充电,也可以给手机充电,不然航模3S锂电池电用不完要使用充电器放电。把瓦力脑袋也加工加工,应该还可以再加点东西上去,做的更像真一些,等有空再说,还拍了完整的视频,头部也可以正常活动了。原来头部不能被副翼摇杆控制转动,不是FPGA程序和遥控器设置的问题,是连接接收器与电平转换模块的线断了一条,害的我查了好几天。
以下是视频链接:FPGA版WALL-E瓦力机器人_第一部
FPGA版WALL-E瓦力机器人_第二部
FPGA版WALL_E瓦力机器人_第三部
高手哈哈,爪子换成能伸缩机械臂再加上可抓取东西,碉堡了。
简单粗暴啊!
补全图片,论坛回帖怎么显示这么慢,还要审核。都不知道回复有没有发成功,没有我爱模型快。




管理员,上午添加的内容,照片,视频链接怎么还不能显示出来?
打造FPGA版WALL-E 瓦力机器人-好厉害。求分享。
技术了得啊···
膜拜啊 太强了
什么时候我也能这么厉害
干的漂亮!崇拜!
小编 牛X。
lz stm32做起来怎么样?当时我也是冲着瓦力去做的,但是因材料的问题就做了两轮车,后来因为驱动的问题耽搁了,不会fpga,只能用stm32了望给点建议



哇,完全看不懂……
好厉害的小编,做的5号机器人好可爱。
很像了。
吊吊吊,各种佩服各种6
看着很霸气,让人兴奋,现在在学单片机,更加有了激情。
FPGA瓦力头部运动与底盘履带悬挂极限运动视频,疯狂的瓦力呵呵,油门推到底就跑这么快,履带悬挂还有点作用,至少没有出现把履带跑掉下来的情况。
瓦力运动极限视频
履带悬挂极限视频
STM32制作瓦力完全足够,先要做个履带底盘,不知道你有没有航模遥控器和接收,有的话可以当控制器用,肯定要买不少东西的,履带,履带驱动器,悬挂轮等,我是买恒龙坦克玩具的配件。机器结构上弄起来挺麻烦的。要铝板,各种型号的螺母螺丝,各种工具等手电钻,曲线锯,铝板钳等等。就是钣金工干的活。
我当初也是从51单片机慢慢开始的,认真学这真是基础。
牛!
这动手能力 膜拜,连个示波器也没用嘛?