适用于复杂负载点应用的数字增强型电源模拟直流/直流控制器
其达到稳定为止。只要检测到稳态运行,就会修改死区并监视上桥臂开关的占空比。此恒压转换器技术的原理是,在稳态条件下,上桥臂开关的最短相对导通时间决定了最高效率点,因为在这一点只需从总线汲取最少的功率即可提供一定的恒定输出功率(见图2)。

图3给出了稳态运行期间在定义的死区设置范围内单次扫描的结果,该结果在测试台上测得。绿线显示了应用于上桥臂开关上升沿的死区(DTR)。红色曲线给出了不同死区设置下的上桥臂开关导通时间的发展趋势,黑色虚线显示了其3阶近似曲线。
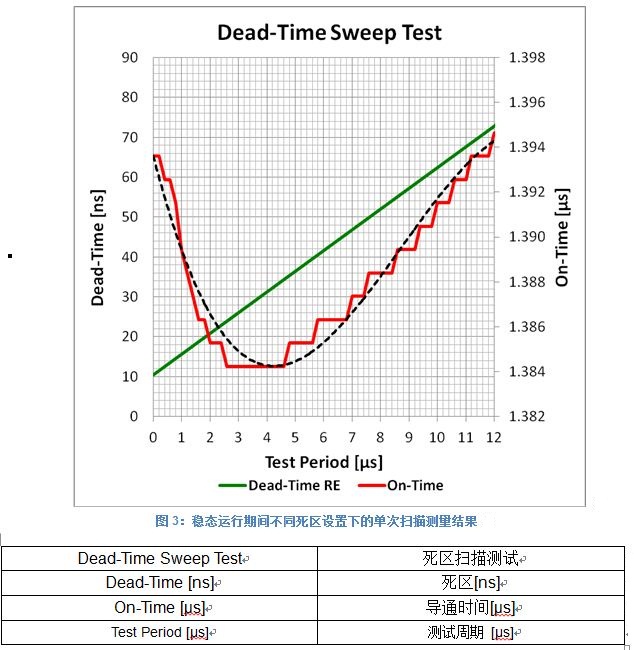
给定的死区扫描范围通过描述系统特性以及定义最好情况(最短死区)和最坏情况(最长死区)来确定。扫描在90%负载(Vin = 12V,Vout = 3.3V,Iout = 9A)条件下以最高分辨率4 ns进行。在图的左侧,占空比的起始值约为1.394 ?s,并且只要死区增大,占空比就会迅速降低。在此区域中,上桥臂开关与下桥臂开关已显示出有所重叠,并且从输入汲取的一些功率直接短路至地。
在死区约为25 ns时,导通时间达到最小值1.384 ?s,之后随死区的进一步增大而再次上升。在非可调设计中,死区已针对所使用的开关调整到至少70 ns,因此这种运行条件下的典型导通时间为1.395 ?s。根据图2中的公式III,原始上桥臂导通时间与最优上桥臂导通时间的差异为11 ns。初看之下,这种差异似乎不大,但从高频转换器的角度看,该差异代表了约0.9%的效率提升,相当于总效率从大约92%升至93%。
可调开关频率和补偿网络
另一个非常好的功能是能够通过软件调整补偿网络和开关频率。这不仅简化了设置配置期间的基本调整,还允许在运行时进行调整。迄今为止,这仍然是全数字控制器尚未取得突破的核心领域。在硬开关拓扑(如同步降压转换器)中,大部分功耗主要来自开关损耗。要提高效率(尤其是轻载条件下),降低开关频率可对提高转换器的总体效率有显著帮助。但是,当降低开关频率时,如果硬件中的补偿网络固定,通常增益会开始下降,并可能导致增益裕量和相位裕量损失。为补偿这种效应,需要调整系统的增益。MCP19111提供了多个寄存器,用于调整PWM发生器的斜坡电压、零点频率(原点处的谐振频率,定义第一个极点)、总增益、斜率增益以及斜率本身。此外,还有寄存器组用于调整放大器失调和电流检测增益。虽然此技术可能需要冗长的系统特性化过程,但有很大几率可显著提升效率和稳定性。
极轻负载效率优化
在异步降压转换器中,续流二极管中的功耗通过正向压降乘以电流确定。由于二极管两端永久存在较大的正向压降并且无法最小化,因此通常使用一个正向压降低很多的附加开关来旁路/替代二极管,最终构成一个同步整流器。此技术常用于负载电流超过1A的情况。但是,在轻载条件下,如果有非常少的电流流经下桥臂开关,则驱动其栅极所需的功率会超出使用开关旁路续流二极管所节省的功率。为了在此特殊情况下进一步提高效率,MCP19111提供了所谓的二极管仿真模式,使能此模式时将关断下桥臂驱动器。禁止驱动器之后,栅极将不再偏置,并且MOSFET的内部二极管将成为整流器,从而最大程度降低功耗。
使用Microchip全新的功率MOSFET系列MCP870xx可对上述用于将部分功耗降至最低和提高系统总效率的措施提供额外支持。此系列快速功率MOSFET具有低RDS(on)和均衡的品质因数(FOM),可提供一系列不同的导通电阻与栅极总电荷(QT)组合来优化半桥的总FOM。下桥臂开关的QT越高,MCP19111的二极管仿真模式越有效。
优化空载操作
MCP19111是电流模式控制器,在正常工作期间可提供最佳性能。但是,电流模式控制器需要至少有一些电流流过才能正常工作。当负载切换至低功耗待机操作时,转换器的输出仍必须提供标称输出电压,但输出功率可能几乎为零。通常,电流模式控制器会切换至输出纹波较高的某种间断(hick-up)模式或脉冲频率模式(PFM)操作,这会超出线路稳压容限并且还经常导致严重的EMI问题。要克服典型电流模式控制器的这一限制,可通过禁止电流环来将MCP19111切换至伪电压模式控制,从而改善输出电压和系统稳定性。
可用性和工具链
MCP19111的一系列增强功能提供了大量用于配置和优化系统的选项。MCU开放的可编程性增加了更多的自由度。因此,Microchip提供了如图4所示的图形用户界面(GUI),用户无需编写代码即可进行特定调整和配置。此GUI与开源固件配合使用,可以对该固件进行修改并将其用作模板来开发各种更高级的功能。
除了配置接口,Microchip还提供了另一个GUI用于测试目的,使用户可通
- 直流稳压电源电路(11-30)
- 2kW新型推挽正激直流变换器的研制(01-05)
- 数字可调式高压直流稳压电源的设计(02-25)
- 基于TMS320LF2407A的模块化直流电源设计(06-14)
- 通信直流电源产品发展趋势简析(06-22)
- 直流数控可调稳压电源的设计(06-24)