基于超级电容器储能的直流DVR装置的研发
1和T2,达到双向直流升压与降压的目的。在升压运行时,T2动作,T1截止,变换器工作在Boost状态;当T1动作,T2截止时,变换器工作在Buck状态,实现降压功能。
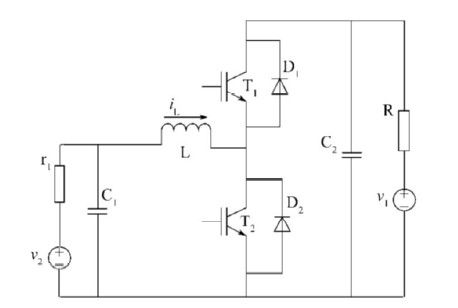
图3 双向DC-DC 变换器主电路
3.1 Boost 模式
开关T2处于恒脉宽调制方式下,双向DC-DC变换器主电路Boost 模式下等效电路如图4 所示。当T2 导通时(图4(a)),电源v2向电感L充电,电能转化为磁能存储于L中,同时电容C2向v1供电;当T2关断时(图4(b)),电感L释放磁能向v1 供电。电感L的储能作用能使电压泵升,通过电容C2 稳压之后,可使输出电压高于输入电压。
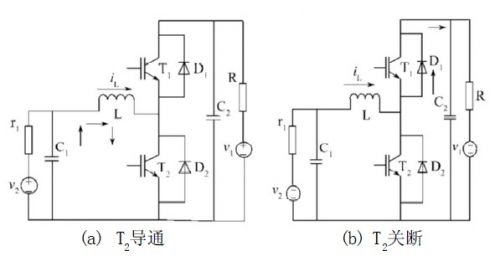
图4 Boost 模式下等效电路
3.2 Buck 模式
开关T1处于恒脉宽调制方式下,双向DC-DC变换器主电路Buck 模式下等效电路如图5 所示。当T1 导通时(图5(a)),v1通过电感L给v2充电,部分电能转化为磁能存储于L中;当T1关断时(图5(b)),电感L中存储的磁能转化为电能,通过二极管给v2充电。Buck模式电流流向与Boost 模式的相反。
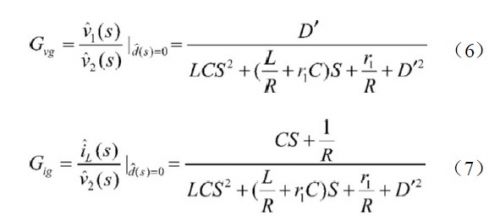
图5 Buck 模式下等效电路
4 超级电容器充放电控制策略
根据超级电容器的特点,本文提出了充电恒流、放电双闭环的分时控制策略。
4.1 超级电容器充电控制
直流母线工作在正常电压范围内,当超级电容器阵列电压低于额定工作电压时,对超级电容器进行充电,其充电控制框图如图6 所示。通过实际充电电流与参考充电电流的滞环比较及对最大开关频率的限制,产生信号控制恒流充电。恒流充电有利于对储能装置的保护,且动态响应较快。

图6 超级电容器充电控制框图
4.2 超级电容器放电控制
超级电容器放电控制系统采用电压外环、电流内环的双闭环结构(图7 )。利用电压环计算得到电压偏差,之后计算出电流环参考值;电流环根据参考值得到合适的补偿电流,通过传递函数变换得到补偿值。图7中:
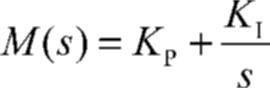
,Vref为给定的电压控制量,Kv为电压反馈放大系数,Ki为电流反馈放大系数,Gvd为S 域的控制电压,Gid为S域的控制电流,为占空比扰动量,为高压侧输出电压扰动量。
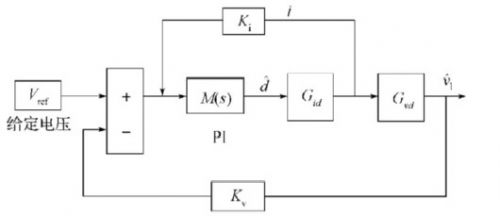
图7 双闭环控制结构框图。
对于Boost 模式工作状态,使用状态空间平均法可得到其状态方程:
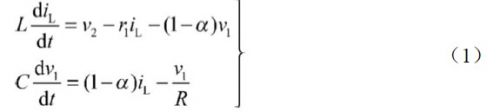
式中:v1--高压侧输出电压;v2--低压侧输入电压;α --时间系数,相当于占空比,α =ton÷(toff+ton);iL --电感电流;R--限流电阻;L--充放电电感量;C--超级电容容量;r1 --电容器内阻。
对状态方程施加小信号干扰,则有瞬时值:
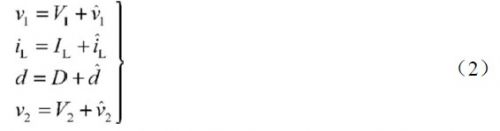
式中:V1 --高压侧输出电压稳态值;V2 --低压侧输入电压稳态值; iL^--电感电流扰动量; v2^--低压侧输入电压扰动量;D--静态占空比;d--动态占空比。
将式(2)代入式(1),得到稳态方程:
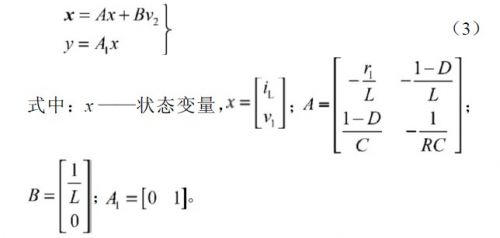
通过对该状态空间平均方程进行干扰,可得到S 域的控制电压(式(4))和控制电流(式(5))的传递函数:
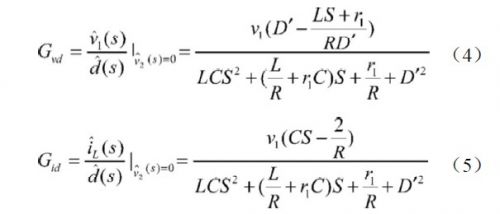
式中:D′=1-D.
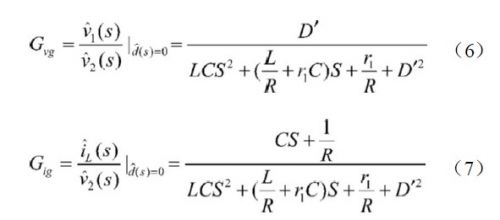
S 域的扰动电压、电流小信号传递函数如下:
5 仿真研究
为了验证参数以及控制策略,选择20 0 只2. 7 V/2 700 F双层电容器串联构成超级电容阵列,使用Matlab/Simulink软件进行仿真实验(图8)。
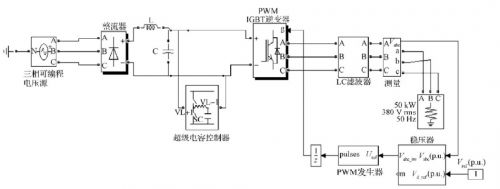
图8 仿真模型结构图
系统采用阻性负载,参数说明如下:系统相电压E=220 V;超级电容阵列电容容量CS=13.5 F,r=0.2Ω,充放电电感为L=1 mH,工作电压范围在300~530 V,最大输出功率为4 kW;仿真运行时间为10 s.当直流母线工作电压正常、超级电容电压低于工作电压时,母线对超级电容器充电(图9);当直流母线电压低于系统工作电压下限时,超级电容器放电(图10)。
装置电源电压为380 V,直流母线电压在1s时刻发生幅度为80%的电压暂降,超级电容电压暂降抑制装置并入直流母线前后母线电压的仿真波形如图11 和图12所示。
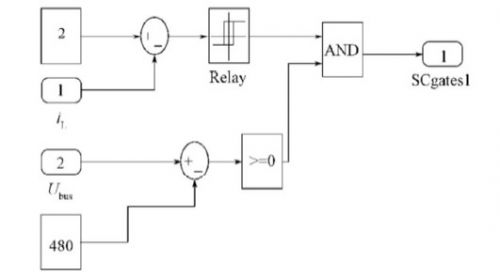
图9 超级电容充电控制图
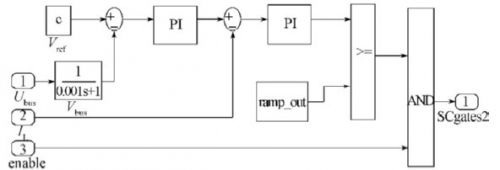
图10 超级电容放电控制框图
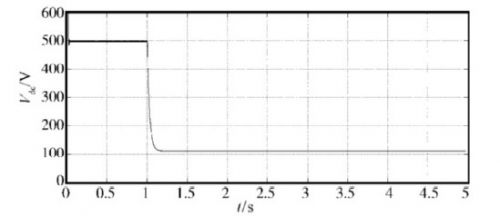
图11 未加抑制装置、直流母线电压暂降80% 时波形
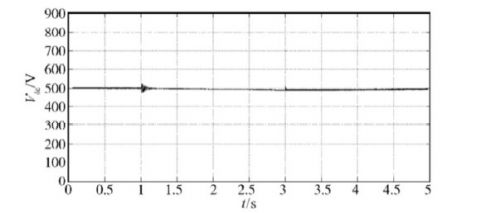
图12 加抑制装置、电压暂降80% 时的波形
在1s时刻直流母线上发生幅度为20%的电压暂降,超级电容电压暂降抑制装置并入直流母线前后母线电压的仿真波形如图13和图14所示。
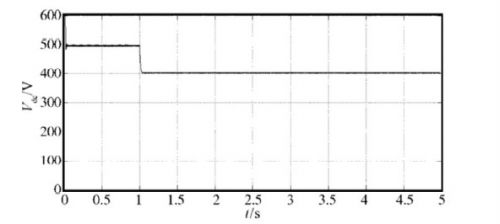
图13 未加抑制装置、电压暂降20% 时的波形。
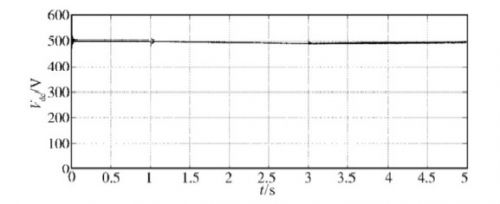
图14 加抑制装置、电压暂降20% 时的波形。
以上仿真的电压暂降均
- 输出电容器的等效串联电阻对滞环控制功率转换器的影响(07-12)
- 八种常用电容器的结构和特点(07-04)
- 低压电解电容器的发展趋势(09-14)
- 电容器故障与检测(01-12)
- 超级电容器太阳能草坪灯的设计与实现(02-12)
- 用薄膜电容器替代铝电解电容器的分析与实践(04-20)