TPS92314 THD 设计考虑因素
摘要
TPS92314器件可安装在初级侧稳压和反向拓扑的LED驱动器中。它是一款离线控制器,经过专门设计,拥有初级侧检测、恒定导通时间和准谐振开关技术。TPS92314应用电路具有高功率因数(PF)、优秀的EMI性能和高系统效率。另外,使用TPS92314器件可实现对低外部组件数目应用解决方案的轻松设计。本文叙述了THD和PF的设计考虑以及设计举例。
1引言
THD(总谐波失真)和PF(功率因数)
如果TPS92314器件工作在自适应算法和单级反向拓扑(例如:PMP4347)的恒定导通时间模式下,则PF校正为自带。
具体条件考虑:AC输入电压(RMS):VAC;线压AC频率:fAC;额定功率:Pin输出电压:Vo;变压器匝数比:n=Np/Ns;
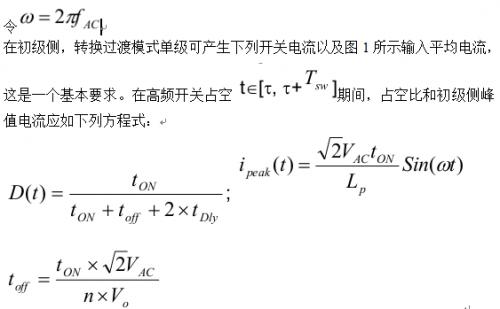
此处,延迟时间可在图1中定义。
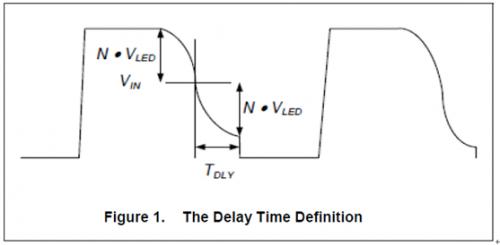
图1延迟时间定义
考虑峰值电流模式的实用设计时,K应大于m.
方程式2表明,输入电流非完全的SINE波形,但是它包含了高阶谐波元素。
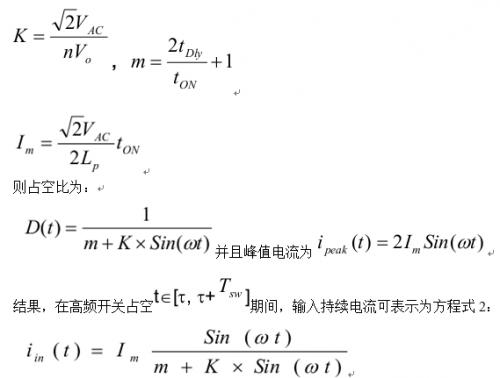
输入总RMS电流可表示为方程式3:
然后:
![]()
方程式4
"I1RMS"是输入电流的基础谐波组成。
实际上,输入功率来自于输入线路AC电压乘以第一个谐波RMS电流。方程式5表明了总谐波失真(THD):
 (方程式5)
(方程式5)
图2表明了THD如何随不同"K"而变化。
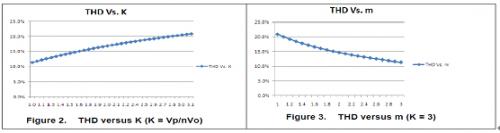
图2 THD与K(K=Vp/nVo)对比图,图3 THD与m(K=3)对比图
图2表明,增加K会引起THD增加。因此,变压器匝数比n(n=Np/Ns)应高到足以实现更低的K.这样,输入电压越高,THD便越高。
同时,增加m会使THD降低。它意味着,如果在开关关断期间延迟时间增加,则THD降低(参见图3)。
通过增加tDly来增加m是可以的,我们知道:
 (方程式6)
(方程式6)
因此,更大的Lp或者Cds可改善THD.例如,Cds增加一个电容便可改善THD.根据TPS92314产品说明书,DLY延迟时间可编程为图4所示。
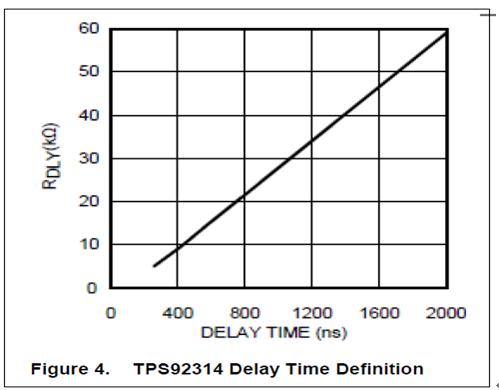
图4 TPS92314延迟时间定义
方程式为: (方程式7)
(方程式7)
其中:KDLY=32MΩ/ns
因此,根据方程式5和方程式6,改进THD结果是可能的。
2 TPS92314环路设计考虑
TPS92314器件使用自适应频率的间断电流模式。图5显示了TPS92314器件的内部结构图。
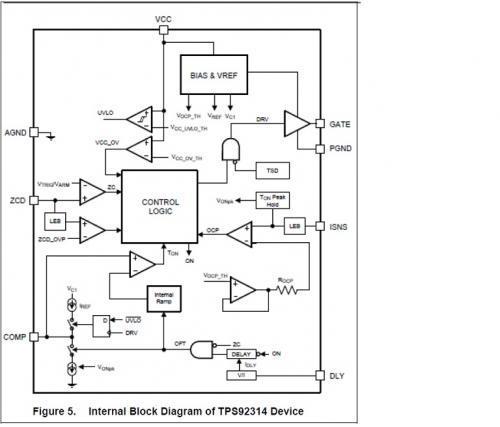
图5 TPS92314器件的内部结构图
图6显示了TPS92314器件的控制结构图。
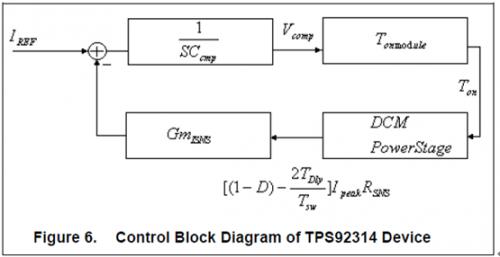
图6 TPS92314器件的控制结构图
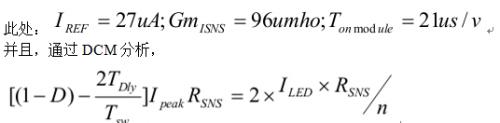
根据TPS92314产品说明书:
就DCM反向功率级而言,根据参考(3),可以获得图7所示小信号电路
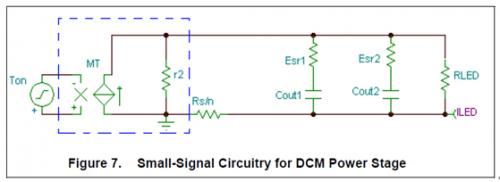
图7 DCM功率级的小信号电路
此处, (方程式8)
(方程式8)
因此,可以得到图8所示完整小信号电路。
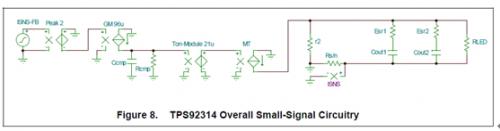
图8 TPS92314完整小信号电路
TPS92314 THD PF 总谐波失真 离线控制器 相关文章:
- TPS92314 THD 设计考虑因素(二)(01-19)
- 信号链基础知识#69:谨慎增加音频处理系统的THD:如何操作,为什么?(01-06)
- 为何要谨慎地增加音频处理系统的THD?(01-06)
- 信号链中增加音频处理系统的THD(09-04)
- 信号链基础知识69:谨慎增加音频处理系统的THD:如何操作,为什么?(02-19)