变压器局部放电在线监测信号中的电磁干扰及抑制
五、随机脉冲型干扰的抑制
这类干扰最难剔除。由于干扰和局放信号在频域内的特征具有相似性,因此现有的大量方法都是从时域考虑的。常用方法有硬件电路法、软件波形识别法和人工智能法。
1.硬件电路法
它的基本思路是利用两个测量点的输出信号中外来脉冲干扰同方向,而内部放电脉冲方向相反的特点,去除脉冲干扰。具体实现为硬件电路,常用电路包括差动平衡法、脉冲极性鉴别法和定向耦合法。
在实际应用中,前两种的效果并不理想。这是因为对于差动平衡法,由于传播路径不同,组成差动的两路信号往往不能很好的对应,因此差动效果不佳。提出了差动"平衡对"的概念对此进行了改进,可消除干扰并同时获得局放脉冲幅值及脉冲个数。脉冲极性鉴别的局限在于由于模拟延迟和极性鉴别器受外界因素影响较多,会造成电子门控误动作,降低了极性鉴别的准确性。
定向耦合法是德国的Borsi H等于1987年提出的。原理图见图1.它用特殊绕制的Rogowski线圈在高压套管底部靠近法兰处耦合局放信号,并根据线圈两端电压的大小来判断是局部放电信号还是外来电磁干扰。该法把Rogowski线圈的中间抽头与变压器套管末屏测量端子连接起来。此时末屏测量端子串一个小电阻接地,可以看成末屏和末屏对地电容组成电容分压器的低压臂,经小电阻接地后形成了一个高通滤波器,只有高频信号才能通过。Rogowski线圈与高压套管末屏测量端子连起来构成定向耦合电路。
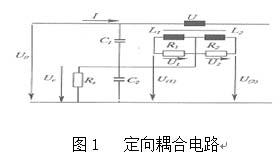
电流I如图示方向时,U(1)=Uc+U1,U(2)=Uc-U2=Uc-U1.此时U(1)>U(2);若电流I反向,则U(1)在实际应用中,人们对此作了改进,用两个罗氏线圈替代原测量线圈并采用选频的方法提高测量信号的信噪比,据论文介绍,得到了较好的结果。
2.软件波形识别法
随着计算机技术和数字信号处理技术的发展,利用脉冲信号特征进行逻辑判断也可抑制干扰。它的前提是脉冲识别,即判断脉冲是否存在、脉冲持续时间和相应的起点与终点,以便较准确地确定放电相位和声波时延。
目前脉冲识别多采用阈值识别法。而现场测量的脉冲多是衰减振荡波,该法很易误判且无法确定脉冲持续时间。提出一种结合脉冲幅值阈值和波形特征来识别振荡脉冲的方法,并在实用中得到了较好效果。
3.模式识别的应用
此法的本质仍是利用信号的相位特性进行区别。局放信号虽然幅值变化很大,但它们的相位分别集中在45°和225°附近。例如,由于电弧放电的发生相位同局放有差异、幅度变化较小并且在脉冲形状上也略有不同,根据这些特点,一个有经验的专家可以很容易地分辨出电弧放电信号这种干扰。模式识别方法就是专家经验的软件实现,它已在CIGER的报告中得到确认,一些相应的软件也已出现。常见的方法包括模糊逻辑法、kohonen网络分类法、KLT变换法和基于最小距离的人工神经网络法等。总体来讲,模式识别方法的难度在于需要积累大量的先验知识并能找出干扰和局放间的特定差异,而在线测量中,在强烈的干扰信号中找出这些差异比较困难。下面介绍其中几种方法。
(1) Karhunen-Loeve-Transform法
研究发现,用于模式识别的输入矢量维数较高时,分类较困难且效果不好;降低维数后,分类效果能得到改善。换言之,为提高识别率、突出信号的特征,首先需去除信号中的干扰或噪声信息。KLT变换的原理如图2所示。由图可以看出,若采用x1-x2坐标系,要进行分类必须同时采用x1、x2坐标;若对此进行正交变换,转移到w1-w2坐标系。则仅需w2坐标即可进行分类。由此可见,经KLT变换,可去除干扰。

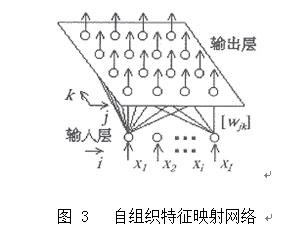
(2)脉冲序列分析法--Kohonen网络
该算法为一种无监督的算法(如图3所示)。它的原理是寻找输入向量到输出层欧氏距离最短的节点,以此为输出,并通过自组织算法可以进行自适应分类,区分局部放电信号和干扰信号,从而达到干扰消除和抑制的目的。
(3)脉冲序列分析法
据介绍该法简单有效且识别率较高:它由局部放电间的放电电压差或相位差构成分析序列,由这些特征来区分不同的放电模式和干扰,以达到干扰抑制的目的;此外,还可以进行故障点定位。
六、总结
大量的研究成果表明,随着A/D转换速率的提高、计算机技术的发展,采用宽频带(10k-1000kHz)传感器结合高速采样的变压器局放在线监测系统已成为发展的主流。信号处理已从传统的谱分析发展到可对局放波形进行时域分析。
数字处理技术和人工智能领域中的一些成果已广泛用于在线监测中的干扰抑制,并且有望取得突破性的成果。
为进一步提高抗干扰措施的有效性,应加强对干扰和脉冲的传播规律的研究,这包括在变电站的传播和变压器内部传播的研究,由此可能发现它们在波形、相位和方向等方面特征的差别。
- AD698型LVDT信号调理电路的原理与应用(01-17)
- 电子元器件基本常识:变压器的基本知识(01-19)
- 变压器的基本知识(01-29)
- 电子变压器的演化(01-29)
- 电路设计基础知识--变压器(01-29)
- 单端正激变压器的设计(06-23)