直流稳压电源设计
的电压或是负载电阻发生任何变化,稳压器的直流输出电压都会始终保持稳定状态。稳压器的参数有纹波系数、响应速度和电压稳定度等等。
直流稳压电源从工作方式上可分为:
①可控整流型。用改变晶闸管的导通时间来调整输出电压。
②斩波型。输入是不稳定的直流电压,以改变开关电路的通断比得到单向脉动直流,再经滤波后得到稳定直流电压。
③变换器型。不稳定直流电压先经逆变器变换成高频交流电,再经变压、整流、滤波后,从所得新的直流输出电压取样,反馈控制逆变器工作频率,达到稳定输出直流电压的目的。
经整流滤波后输出的直流电压,虽然平滑程度较好,但其稳定性仍比较差。经整流滤波后的直流电压必须采取一定的稳压措施才能适合电子设备的需要。常用的直流稳压电路有并联型和串联型稳压电路两种类型。
下面介绍硅稳压管并联稳压电源和晶体管并联稳压电源的设计方案。
一、硅稳压管并联稳压电源
1、电路原理分析
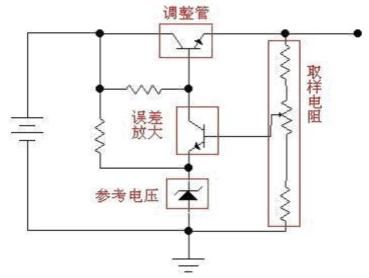
图3-1-1是硅稳压管稳压电源。其中D1是稳压二极管,R1是限流电阻,R2是负载。由于D1与R2是并联,所以称并联稳压电路。此电路必须接在整流滤波电路之后,上端为正下端为负。由于稳压管D1反向导通时两端的电压总保持固定值,所以在一定条件下R2两端的电压值也能够保持稳定。
下面我们来分析一下具体工作原理:
假设设输入电压为UI,当某种原因导致UI升高时,UD1相应升高,有稳压管的特性可知UD1上升很小都会造成ID1急剧增大,这样流过R1上的IR1电流也增大,R1两端的电压UR1会上升,R1就分担了极大一部分UI升高的值,UD1就可以保持稳定,达到负载上电压UR2 保持稳定的目的。这个过程可用下面的变化关系图表示:
UI↑→UD1↑→ID1↑→IR1↑→UR1↑→UD1↓
相反的,如果UI下降时,可用下面的变化关系图表示:
UI↓→UD1↓→ID1↓→IR1↓→UR1↓→UD1↑
通过前面的分析可以看出,硅稳压管稳压电路中,D1负责控制电路的总电流,R1负责控制电路的输出电压,整个稳压过程由D1和R1共同作用完成。
2、元件选择
下面我们来看看已知负载电压UR1和负载电流IR1时如何设计硅稳压管稳压电源。
(1)初选稳压管D1
一般情况下,可以按照UD1=UR2和ID1≈(IR2)max来初步选定稳压管D1,如果负载有可能开路则应选择(ID1)max≈(2-3)(IR2)max,这是因为当负载时所有电流全部都会流过D1,所以ID1应该适当选择大一点。。
(2)选定输入电压
一般可选择UI=(2-3)UR2
(3)选定限流电阻R1
R1=(UI-UR2)/(ID1+IR2)
但是需要考虑两种极限情况:
当UI最大,且负载开路时(即IR2=0),流过D1的电流最大。为了不超过D1的最大允许电流(ID1)max,需要有足够大的电流电阻,否则会烧坏D1。则R1需要满足:
当UI最小,且负载电流最大时,流过D1的电流最小。为了保证此时D1能够工作在击穿区起到稳压的作用,要有一定的电流流过D1,一般取5mA-10mA。则R1需要满足:
R1<((UI)min-UR2)/(ID1+(IR2)max)
R1>((UI)max-UR2)/ ID1)max
限流电阻R1的值应该在上面两个公式的范围内选择。
(4)检查电路稳定度
电路稳定度需要根据实际电路的要求来确定,如果稳定度不够,可以适当增加R1和UI,还可以选择动态电阻r比较小的稳压管。
二、晶体管并联稳压电源
1、电路原理分析

图3-1-2是晶体管并联稳压电源。其中T1是调整管、D1是基准稳压管,R1是D1的限流电阻,R2是限流电阻,R3是负载。这个稳压电路的输出电压约等于稳压管D1的稳压值(实际上要加上T1发射结电压,一般锗管取0.3V,硅管取0.7V)。
这是由于电源在工作时,T1发射结导通,发射极电压与基极电压保持一致,而基极电压被D1稳定在一个固定值。这个电路可以看作T1将D1的稳压作用放大了β倍,相当于接入一个稳压值为D1稳压值,稳压效果为β倍D1稳压效果的稳压管。
电路工作原理是:
UI↑→UD1↑→(UT1)EC↑→(IT1)EC↑→IR2↑→UR2↑→(UT1)EC↓
UI↓→UD1↓→(UT1)EC↓→(IT1)EC↓→IR2↓→UR2↓→(UT1)EC↑
2、元件选择
这个电路选择元件的步骤与硅稳压管并联稳压电路类似,主要从下面几个方面考虑。
(1)初选调整管T1和稳压管D1
选择调整管T1时,主要考虑其额定电流ICM要大于输出电流IO,以保证负载开路时调整管不会因为电流过大而损坏。另外,为了保证调整管有良好的调整作用,还要求β值大、漏电流小。
选择稳
- UPSONIC在线式UPS电源电路设计(06-03)
- 电力逆变电源的应用实例(04-26)
- 晶闸管三相全控桥式整流电路的直流电源设计(02-08)
- 不间断电源与直流电源在线维护及管理探讨(05-17)
- 数控直流电源制作 (06-06)
- 简单的三端直流稳压电源制作(06-07)