准固定频率滞环PWM电流模式控制方法的研究
Hz),电路中的磁性元件发出的噪音会十分刺耳。
(4)电路中的变压器的设计依赖于固定的开关频率。假如电路在工作中开关频率降低很多,有可能引起变压器铁心饱和。
然而这些考虑都并不需要开关频率严格固定,只需要将开关频率限定在一定的范围内,或平均开关频率基本固定就可以了。因此,可以通过适当放宽对开关频率的限制来达到提高电流控制快速性的目的。
根据这一思路,本文提出一种准固定频率滞环PWM电流控制方法。这种方法在滞环PWM控制的基础上,加入开关频率控制环,使得电路的平均开关频率固定,而每个开关周期并不严格相等。这样就在适当放宽固定开关频率的前提下,使控制的快速性得以大幅度提高。
2.2滞环PWM电流控制的分析
滞环PWM电流控制是一种较为传统PWM电流控制方法[4],具有稳定性好,响应速度快,误差可控等优点。其系统结构如图2,系统相轨迹如图3。
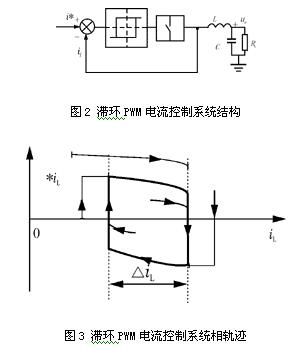
从相轨迹可以看出,相平面上存在一个稳定的极限环,不论系统初始状态如何,经过一次开关转换过程,相轨迹都会收敛于极限环,因此,滞环PWM控制具有非常好的稳定性和快速性。
滞环PWM控制系统的开关周期同滞环宽度直接相关,并同系统主电路参数L、C、R及输入、输出电压密切相关,为了得到开关周期同这些量间的解析关系,需要对实际系统进行简化,并作出合理化假设。
在实际系统中,滤波电容C的值往往都比较大,以保证较小的输出电压纹波,因此可以假设其两端电压uo在一个开关周期内是不变的,同时也可以假定输入电压的值在一个开关周期内是不变的,这样电感L的电流iL的波形就只由输入、输出电压和导通、关断时间决定。
设开关导通时电感L两端电压uL=U+,而开关关断时电感L两端电压uL=-U-,对于降压型电路,U+=Uin-Uo,U-=Uo。根据图4的波形可以计算出开关周期Ts:
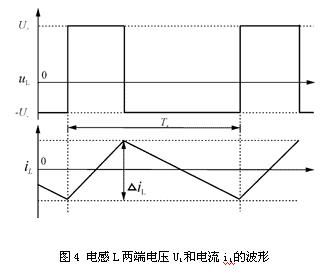
Ts=△iLL(1/U++1/U-)(1)
其中L是常量,U+、U-是变量,△iL是滞环宽度。当△iL不变时,Ts随着U+、U-的变化而改变。
2.3准固定频率滞环PWM控制方法
根据式(1),在电路参数不变的条件下,开关频率是同滞环宽度△iL相关的,因此,只要引入频率负反馈,动态地调整滞环比较器的滞环宽度,就可以调节开关频率,将开关频率限制在一定的范围内。
准固定频率滞环PWM控制系统的结构如图5。
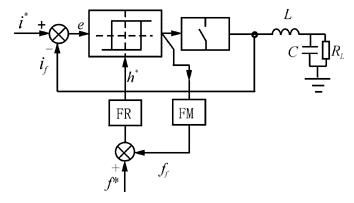
图5准固定频率滞环控制系统结构
其中FM为测频电路,可以采用模拟或数字电路构成。FR为频率调节器,一般可采用PI调节器。
为了能调频,必须采用环宽可调的滞环比较电路,可以有两种实现方法:
(1)将误差信号e与环宽给定信号h*相乘,再进行比较,h*越大,等效环宽越小,开关频率越高。
(2)直接通过改变滞环比较器的输出限幅值来改变环宽,h*越大,环宽越大,开关频率越低。
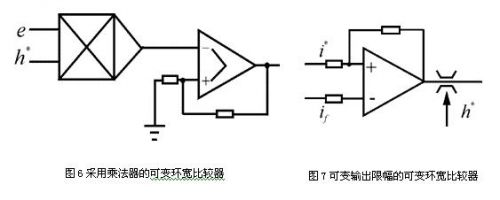
由于这两种方法中h*对开关频率的控制作用方向相反,因此需要相应改变频率调节器的极性。
为了不影响电流环的稳定性和动态特性,频率环的调节速度应比较慢。这样,增加了频率控制环后的系统的稳定性和快速性同传统的滞环PWM控制系统基本上是一样的。
3准固定频率滞环PWM控制方法的实验研究
为了证实准固定频率滞环PWM控制方法的可行性以及其快速性,进行了多种实验。实验电路采用调整比较器输出限幅的办法来调节频率,测频电路采用单稳态触发器,频率调节器采用比例—积分调节器。PWM开关频率设定值约为70kHz.。
图8和图9为给定信号是大幅度变化的方波时,电感电流跟随变化的情况。图8中给定为10kHz方波,图9中给定为1kHz方波,幅值都是0~2A。
图10中给定为正弦波,频率1kHz,幅度约为1~3A。
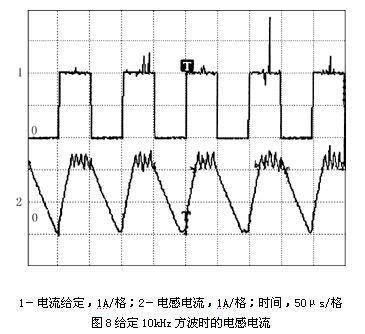
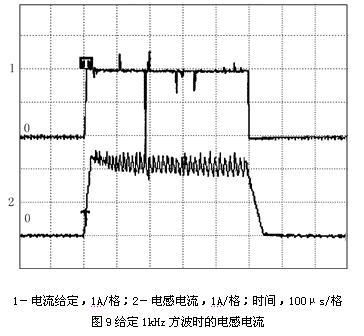
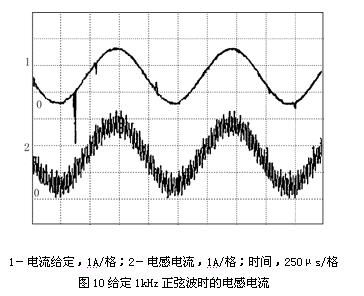
可以看出,采用准固定频率滞环PWM控制方法的电流控制系统的跟随特性非常好,跟踪速度很快。
而且,跟随阶跃给定时,电流并没有出现振荡现象,这说明系统的稳定性也是很好的。
图11为图9的局部放大,从中可以看出开关频率是在变化的。

4结论
本文针对现有的固定频率电流模式控制方法的控制快速性与固定开关频率的矛盾,提出了一种新的准固定频率滞环PWM电流控制方法,它通过适当放宽对开关频率的严格要求,达到明显提高控制快速性的目的。本文通过实验证明,这种控制方式具有很高的快速性,同时保持了良好的稳定性,适合于对控制速度要求很高的场合。
参考文献
1W.Tang,F.C.Lee,SmallSignalAnalysisofAverageCurrent-ModeControl,proceedingsofAPEC'92
2Wei.Tang,F.C.Lee,ChargeControl:Modeling,AnalysisandDesign,IEEETrans.onPowerElectronics,Vol.8,No.4,October1993,pp394-403
3Young-SeokJung,Jung-
- 大电流/高速LED驱动器彻底改变了PWM调光(08-19)
- 大电流/高速 LED 驱动器给 PWM 调光带来了突破性的改革(01-06)
- 取替RC采用硅振荡器定时更胜一筹(02-17)
- 解析PWM开关稳压电源尖峰干扰(07-19)
- 基于SPWM的交流稳压电源设计方案(09-15)
- 基于DSP生成SVPWM在逆变电源中的应用(11-09)