基于SLH89F5162的智能清洁机器人
电机驱动模块为清洁机器人的行驶提供动力,机器人启动、行驶和刹车时电机都会需要较大的驱动电流,该模块必须能够提供足够的电流并保证发热量不会太大。本系统选用了驱动芯片L298N.
L298N是ST公司生产的一种高电压、大电流电机驱动芯片。该芯片采用15脚封装。主要特点是:工作电压高,最高工作电压可达46V;输出电流大,瞬间峰值电流可达3A,持续工作电流为2A;额定功率25W.内含两个H桥的高电压大电流全桥式驱动器,可以用来驱动直流电动机和步进电动机、继电器线圈等感性负载;采用标准逻辑电平信号控制;具有两个使能控制端,在不受输入信号影响的情况下允许或禁止器件工作有一个逻辑电源输入端,使内部逻辑电路部分在低电压下工作;可以外接检测电阻,将变化量反馈给控制电路。使用L298N芯片驱动电机,该芯片可以驱动一台两相步进电机或四相步进电机,也可以驱动两台直流电机。
引脚J1可用于输入PWM脉宽调制信号对电机进行调速控制。(如果无须调速可将两引脚接5V,使电机工作在最高速状态。)实现电机正反转也很容易,输入信号端IN1接高电平输入端IN2接低电平,电机M1正转。(如果信号端IN1接低电平,IN2接高电平,电机M1反转)控制另一台电机是同样的方式,输入信号端IN3接高电平,输入端IN4接低电平,电机M2正转。(反之则反转),PWM信号端A控制M1调速,PWM信号端B控制M2调速。可参考表2-2:
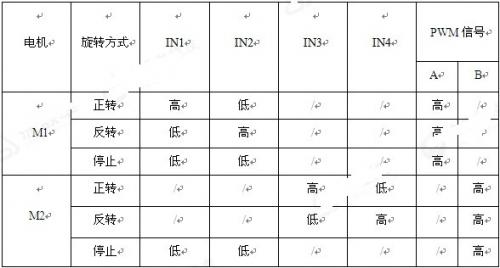
表2-2驱动模块控制表
清洁机器人必须知道自身位置,在特定位置或区域进行特定的动作,完成对房间的吸尘任务。它需要通过传感器进行障碍检测,并将障碍物信息传送给MCU,进行决策,最终完成全区域路径覆。障碍探测是指由各种传感器组成的传感器阵列对周围未知环境进行探测。整个传感器阵列就像是清洁机器人的"眼睛",收集周围未知环境的某些信息。清洁机器人中的传感器数量比较多,相关的有用于环境感知的传感器、自身定位传感器,种类繁多,将这些传感器的信息有效融合是一个重要问题。
方案l:避障用激光传感器,激光传感器是一种利用激光技术进行测量的新型传感器。它由激光器、激光检测器和测量电路组成,具有能实现无接触远距离测量、速度快、精度高、量程大、抗光、电干扰能力强等优点。缺点是激光传感器价格昂贵,外接电路设计十分复杂,不适合小车的需要,因此放弃该方案。
方案2:避障用超声波传感器,超声波传感器是一种利用超声波的特性研究的测量传感器。它主要由压电晶片组成,用来发射和接收超声波。超声波在空气里传播时,会因不同介质的声阻抗不同而产生反射,因此测量发射接收信号间的时间差,可以得到障碍物的距离,该信号经过运算放大器,传送给控制芯片LPC2132,LPC2132发出控制信号改变小车的转向,作出对障碍物的正确判断。超声波传感器的优点是反应速度灵敏,可测距离远,收到外界的干扰小,缺点是超声波在小空间不同方向里会进行多次反射,当和障碍物形成一定角度时,会发生镜面反射,产生幻影,从而动作混乱。
方案3:避障用红外光电开关。红外发射器发出红外线,遇到障碍物后,光线反射回来,接受的光感三极管导通,单片机接受到相应的电平信号。其优点是对近距离的障碍物反应速度灵敏,信号之间抗干扰能力强,缺点是距离要求近,容易受自然光的影响。经过传感器性价比和课题实际要求的综合分析,超声避障实现方便,技术成熟,是移动机器人常用的避障方法,因此我们选择超声波传感器作为机器人的眼睛[5]。
本系统中采用了US-100超声波测距模块,可实现2cm~4.5m的非接触测距功能,拥有2.4~5.5V的宽电压输入范围,静态功耗低于2mA,自带温度传感器对测距结果进行校正,同时具有GPIO,串口等多种通信方式,内带看门狗,工作稳定可靠。
遥控可以使机器人的操作更加方便,本系统中要通过智能手机遥控机器人,而智能手机的信号正是通过蓝牙发出,因此只需在机器人上安装蓝牙模块。由于机器人只接受数据,不发送数据,所以只需蓝牙的从机模块即可。
本系统中采用了型号为HC-06的蓝牙模块,其中编号06就表示其为从机模块,在蓝牙模块的命名规则中偶数命名的型号出厂时就确定了从机,并无法更改。用户不可以自己切换主机或者从机,用户可以空过AT指令集对蓝牙模块进行配置,AT指令集较少,包括修改蓝牙名(限于从机),修改密码,修改波特率,询问版本号等几个基本功能。
- Windows CE下驱动开发基础(11-14)
- 基于WinCE6.0的LPC3250串口驱动程序开发(01-05)
- 嵌入式系统 Boot Loader 技术内幕(3)(03-20)
- 基于计算机串口DSP程序加载的实现(04-10)
- 基于嵌入式WinCE与MSP430单片机多串口通信设计(07-10)
- 基于μC/OS-II和TCP/IP协议的多串口服务器(08-23)