基于DSP的双极性双调制波高频链逆变器实现
1 引言
DC/AC逆变电源应用广泛,传统的低频逆变技术采用工频变压器,其缺点明显。所谓高频链逆变技术就是采用高频变压器替代低频变压器传输能量,并实现变流装置初、次级电源之间的电气隔离,减小了变压器的体积和重量,克服了低频逆变技术的缺点,显著提高了逆变器的特性。
双向电压型高频链逆变器存在一个固有的缺陷,即采用传统PWM技术的周波变换器换流时漏感能量会引起电压过冲。在不增加拓扑复杂性的情况下,采用合理的调制方法可解决这一问题。双极性双调制波方法是一种有效的方案,在不加箝位或吸收电路时,该方法可以实现高频逆变桥开关管的ZVS开通和周波变换器开关管的ZCS关断;滤波电感电流极性选择信号的引入,避免了换流重叠期间周波变换器中的环流现象。此外,该控制方法易于用数字控制实现。这里在全桥全波式高频链逆变器拓扑的基础上,实现了基于DSP TMS320F2812的双极性双调制波控制策略。
2 主电路与工作原理
全桥全波式高频链逆变器的基本结构如图1所示,主要由高频逆变桥、高频变压器、周波变换器和输出滤波器组成。其中VS1~VS4为高频逆变桥的开关管,VS5~VS8为周波变换器的开关管,T为高频变压器,Lf,Cf组成滤波器,Ui为输入直流电压,uo为输出电压。该拓扑具有变换效率高、可靠性高、双向功率流和两级功率变换等特点。

双极性双调制波控制的原理图如图2所示。它将三角波作为载波,调节器的输出与其相反值作为调制波,对电路中的开关管进行控制。高频逆变桥可看作单相方波逆变器,若不考虑死区时间,则逆变桥开关管驱动信号的占空比恒为0.5。周波变换器采用移相控制,驱动信号由调制波及其相反值分别与三角载波交截得到,移相角随正弦规律略有变化。为保证周波变换器开关管换流时滤波电感电流连续,VS5和VS7,VS6和VS8的驱动信号间应有共态导通时间。另外,周波变换器开关管流过的电流为滤波电感电流,为防止周波变换器开关管在换流时电路产生环流,应检测滤波电感电流的极性来控制周波变换器中各开关管的通断。
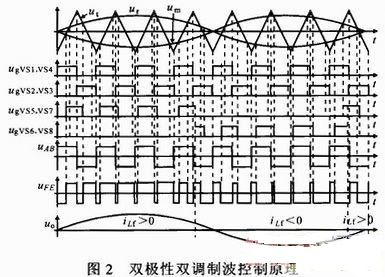
由图2可知,采用双极性双调制波策略时,高频逆变桥可以视为方波逆变器。在周波变换器中,忽略滤波电感电流极性选择,当Uo>0时,VS5,VS7为超前臂,VS8,VS6为滞后臂;当uo<0时,VS5,VS7为滞后臂,VS8,VS6为超前臂。当不考虑高频逆变桥死区以及周波变换器换流重叠区时,所有开关管驱动信号的占空比为0.5。
在该控制方法中,高频变压器传递的是占空比恒为0.5的交流方波,高频交流方波再经过周波变换器进行低频解调,输出双极性SPWM波,经低通滤波后,输出正弦波。该控制方法解决了电压型高频链逆变器换流时固有的电压过冲问题,控制信号易于用数字控制实现。
3 控制信号的实现原理与DSP系统
传统的移相技术的驱动信号实现较为简单,用常用的集成PWM控制器即可实现,如IC芯片UC3875等。周波变换器开关管驱动信号的占空比并非完全恒定,相位差随正弦规律变化,用IC实现较复杂。而利用DSP生成脉冲,只需编程,使用事件管理器就能产生高频链逆变器所有开关管的驱动信号,并且精度高,稳定性好。
此处利用TMS320F2812芯片的事件管理器来产生高频链逆变器所有的脉冲。产生开关管的控制信号的原理如图3所示。
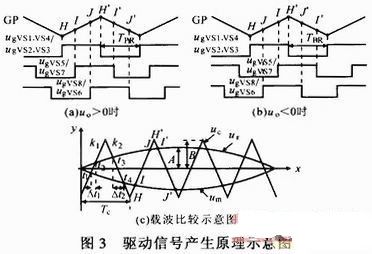
定时器GP工作在连续增减计数模式,即从零开始递增计数至设定值,然后又递减计数至零,如此循环,计数周期为开关管的一个开关周期。
高频逆变桥各开关管的驱动信号为ugVS1,VS4,ugVS2,VS3,其产生过程较为简单。如图3所示,当定时器工作在增计数模式时,UgVS 1,VS4为高电平,ugVS2,VS3为低电平,而当定时器工作在减计数模式时,ugVS1,VS4为低电平,ugVS2,VS3为高电平。无论输出电压为何值,均在定时器计数至周期值或零时发生跳变,即计数值与比较寄存器值在H,H’点匹配。
周波变换器的控制信号为ugVS5,ugVS6,ugVS7,ugVS8,在图3a中,当定时器工作在增计数状态时,计数值与比较寄存器值在I点及J点发生比较匹配,ugVS5,ugVS8为高电平;当定时器工作在减计数状态时,计数值与比较寄存器值在I’点及J’点发生比较匹配,ugVS5,ugVS8跳变为低电平。ugVS6,ugVS7分别与ugVS5,ugVS8互补,则可以产生4路移相PWM控制信号,移相角随正弦规律略有变化。
图3b与图3a原理类似,只是ugVS5,ugVS7从超前臂变为滞后臂,VS8,VS6从滞后臂变为超前臂。载波比较示意图如图3c所示,其中ur为调制波,um为其反值,uc为双极性的三角载波,Tc为载波周期,A为正弦调制波幅值,B为三角载波幅值。
DSP的定时器工作在连续增减计数模式,设当定时器工作在增计数模式时三角波的斜率为k1,由图3c及两点直线方程可知:
设正弦调制波ur的函数为yr=sinωt,um的函数为ym=-sinωt。将t1,t2及在该时刻的函数值代入式(1)得到:
- 基于DSP控制技术的逆变器谐波失真消除 (04-17)
- 基于DSP控制的全数字UPS逆变器设计(09-19)
- DSP控制SPWM全桥逆变器直流偏磁的研究(01-21)
- 基于DSP控制的25Hz逆变电源抗负荷冲击策略(03-02)
- 基于TMS320LF2407A的全数字单相变频器的设计 (08-21)
- 基于TMS320F2812的变频调压功率信号源设计(10-28)