实时嵌入式操作系统VxWorks设备驱动程序的设计
VxWorks是WindRiver公司开发的一种高性能的嵌入式实时操作系统(RTOS),以其优良的可靠性、开放性、实时性和易用性赢得了大量的客户。VxWorks是目前嵌入式系统领域中使用最广泛、市场占有率最高的系统,被广泛地应用在通信、军事、航空、航天等高精尖技术及实时性要求极高的领域中,如卫星通讯、军事演习、弹道制导、飞机导航等。
在目前多数操作系统中,用户必须通过驱动程序才能与设备进行交互,正是设备驱动程序为其提供了可访问性和可操作性,而设备驱动程序本身跟操作系统的相关性特别密切。本文针对VxWorks操作系统特点,分析设备驱动程序的功能、组成和开发过程,并给出END网口驱动程序的一个设计实例。
1 嵌入式实时操作系统VxWorks
下面首先围绕VxWorks的特点和结构这两个关键问题进行阐述。
1.1 VxWorks的特点
1)可靠性 操作系统的用户希望在一个工作稳定、可以信赖的环境中工作,所以操作系统的可靠性是用户首先要考虑的问题。而稳定、可靠一直是VxWorks的一个突出优点。自从对中国的销售解禁以来,VxWorks以其良好的可靠性在中国赢得了越来越多的用户。
2)实时性 实时性是指能够在限定时间内执行完规定的功能并对外部的异步事件做出响应的能力。实时性的强弱是以完成规定功能和做出响应时间的长短来衡量的。VxWorks的实时性非常强,其系统本身的开销很小,进程调度、进程间通信、中断处理等系统公用程序精练而有效,它们造成的延迟很短。VxWorks提供的多任务机制中对任务的控制采用了优先级抢占(Preemptive Priority Scheduling)和轮转调度(Round-Robin Scheduling)机制,也充分保证了可靠的实时性,使同样的硬件配置能满足更强的实时性要求,为应用的开发留下更大的余地。
3)可裁减性 用户在使用操作系统时,并不是操作系统中的每一个部件都要用到。例如图形显示、文件系统以及一些设备驱动在某些嵌入式系统中往往并不使用。VxWorks由一个体积很小的内核及一些可以根据需要进行定制的系统模块组成。VxWorks内核最小为8 kB,即便加上其他必要模块,所占用的空间也很小,且不失其实时、多任务的系统特征。由于它的高度灵活性,用户可以很容易地对这一操作系统进行定制或作适当开发,来满足自己的实际应用需要。
1.2 VxWorks系统结构
VxWorks系统结构如图1所示,可以从6部分来说明。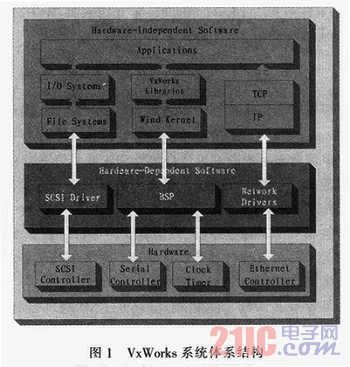
1)高性能实时内核(Wind Kernel) VxWorks的核心,一般称作Wind,Wind使用中断驱动和基于优先级的调度方式。负责多任务调度、任务间的同步、进程间通信机制、中断处理、看门狗和内存管理机制。
2)文件系统(File System) VxWorks提供快速文件,它包括几种支持使用块设备(如磁盘)的本地文件系统。这些设备都使用一个标准的接口,从而使得文件系统能够灵活地在设备驱动程序上移植。另外,VxWorks也支持SCSI磁带设备的本地文件系统。
3)设备驱动(Device Drivers) VxWorks系统提供BSP、Network Driver、SCSI Driver构成硬件抽象层。硬件抽象层是一个介于操作系统和底层硬件之间的软层次,包括了系统中大部分与硬件相关的软件模块。在功能上包含两部分:系统初始化及与硬件相关的设备驱动。
4)I/O系统(I/O System) VxWorks提供了一个快速灵活的与ANSIC兼容的I/O系统,包括UNIX标准的缓冲I/O和POSIX标准的异步I/O 。
5)网络堆栈(Network Stack) VxWorks提供了对其他网络和TCP/IP网络系统的"透明"访问,包括与BSD套接字兼容的编程接口,远程过程调用(RPC),远程文件访问以及BOOTP和ARP代理。所有的VxWorks网络机制都遵循标准的Intemet协议。
6)板级支持包 BSP(Board Support Package)板级支持包向VxWorks操作系统提供了对各种板子的硬件功能操作的统一的软件接口,它是保证VxWorks操作系统可移植性的关键,它包括硬件初始化、中断的产生和处理、硬件时钟和计时器管理、局域和总线内存地址映射、内存分配等等。每个板级支持包括一个ROM启动(Boot ROM)或其他启动机制。
2 VxWorks设备驱动程序的设计
为了实现应用程序的可移植性,将应用程序从直接操作硬件设备中解放出来,VxWorks操作系统为应用程序操作硬件设备提供一个一致的接口。这个接口就是由操作系统的I/O系统提供的。I/O系统将应用程序的I/O请求传递给设备专用的I/O函数。这些设备专用的I/0函数就是由设备驱动程序提供的。本章从功能、接口与结构3个角度阐述设备驱动程序的设计。
2.1 设备驱动程序的功能
1)对设备进行初始化 初始化的目的是使设备处于某种工作状态,以便用户程序访问该设备。
2)打开设备操作 打开设备操作实际上是查询用户指定的设备,并查看用户是否可以使用该设备。因为设备是共享资源,当设备正在被使用时,系统要对它进行保护,禁止其他任务对设备进行操作,直到设备资源被释放。
3)关闭设备操作 关闭设备操作就是释放设备资源。任务对设备完成操作后,必须进行关闭设备操作,否则设备总是处于被占用状态,其他任务无法使用。与打开设备操作相对应,有打开操作就应该有关闭操作。
4)从设备上接收数据并提交给系统 这项功能通常就是所说的读操作,接收外部传输来的数据。接收数据采用的方式有查询方式、中断方式和DMA方式。
5)把数据从主机上发送给设备 这项功能对应通常的写操作,把主机上的数据传送给外界。通常系统主动调用该操作进行数据发送,有时也采取中断方式发送数据。
6)对设备进行控制操作 在使用设备过程中,有时根据应用的需要对设备进行控制(例如改变设备某个状态),而控制操作就能提供这种功能。
2.2 设备驱动程序的接口
VxWorks通用设备驱动程序基本都是通过I/O系统来存取的,这样做的好处是可以屏蔽底层硬件,对上层应用程序提供统一的接口。Vx-Works的I/O系统由基本I/O及含buffer的I/O组成,它提供标准的C库函数,基本I/O库与Unix兼容,而含buffer的I/O则与ANSI C兼容。VxWorks的I/O系统有其独特的特性,使得它比其他I/O系统更快速、灵活,这在实时系统中非常重要。还有一些特殊的通用IO设备驱动程序如串行通用IO设备驱动程序由于其自身的特性,虽然不是通过标准I/O来进行存取的,但是也都有它们各自相关的规范。下面只介绍通过I/O系统存取的通用IO设备驱动程序。
VxWorks作为实时操作系统为了能够更快、更灵活地进行I/O操作,提供了若干库来支持标准的字符设备和块设备。一个字符设备的驱动程序和I/O系统直接作用,调用驱动程序安装函数iosDrvInstall()在VxWorks中安装驱动程序。它执行7个基本的I/O操作:create,rem-ove,open,close,read,write和ioctl。如果设备不支持某些I/O操作,则相应的程序可以被省略。iosDrvInstall()只是为驱动程序在驱动程序表中分配了一个位置,要运行驱动程序还需要调用设备安装函数iosDevAdd()。iosDevAdd()把设备名和驱动程序号写到数据结构DEV_ HDR中,并把它加到系统的设备列表中。
一个块设备的驱动挂在文件系统上比直接挂在I/O系统上使用起来更方便。它先和文件系统作用,再由文件系统与I/O系统作用。块设备驱动程序不使用iosDrvlnstall()来安装驱动程序,而是通过初始化块设备描述结构BLK_DEV或顺序设备描述结构SEQ_DEV来实现驱动程序提供给文件系统的功能。类似的,块设备驱动程序不使用iosDevAdd()来将驱动程序装入I/O系统,而是使用文件系统设备初始化函数,如dos-FsDevInit()来完成。实际上,文件系统把自己作为一个驱动程序装到I/O系统中,并把请求转发给实际的设备驱动程序。
2.3 设备驱动程序的组成
设备驱动程序包括3部分:初始化部分、函数功能部分和中断服务程序ISR。
1)初始化部分初始化硬件,分配设备所需的资源,完成所有与系统相关的设置。如果是字符设备,首先调用iosDrvInstall()来安装驱动程序,把中断向量和ISR挂上,然后调用iosDevAdd()将驱动程序加入I/O系统中;如果是块设备,首先把中断向量和ISR挂上,在内存中分配一个设备结构,然后初始化该结构。用户要使用该设备时,先调用设备初始化函数xxlnit(),再调用设备创建函数xxDevCreate(),返回一个BLK_DEV结构的指针,供文件系统初始化函数使用。
2)函数功能部分完成系统指定的功能。对于字符设备,这些函数就是指定的7个标准的I/O函数;对于块设备,则是在BLK_DEV或SEQ_DEV结构中指定的功能函数。
3)中断服务程序是实时系统的重要组成部分,系统通过中断机制来了解外部事件,并作出响应。实时系统的反应速度取决于系统对中断的响应速度和中断处理程序的处理速度。因此,中断服务程序的处理时间应尽量短。所有的中断服务程序共享一个堆栈,没有任务控制块,所以,在中断服务程序中不能使用可导致阻塞的函数,如printf(…)、semTake(…)等。中断服务程序中可以使用semGive(…)与其他的非中断服务程序进行通信。理想的情况,一个中断服务程序仅调用一个semGive(…)系统调用,也就是说,中断服务程序的主要功能应该是发起一个任务来完成必要的处理。为提高中断服务程序与任务的合作性能,最好的机制是信号量。
- Linux操作系统网络驱动程序编写(04-11)
- Linux系统对ISA总线DMA的实现(06-19)
- 基于MPEG-4的嵌入式多媒体监控系统中压缩/解压卡的设计与实现(10-15)
- 基于嵌入式的故障诊断专家系统驱动程序设计(11-29)
- 嵌入式Linux下的LCD驱动程序设计与实现(04-18)
- CAN通信卡的Linux设备驱动程序设计实现(04-25)