基于DSP的自动避障小车
时间:04-05
来源:电子设计工程 赵晓军 刘孟哲 曹建坤 高旭光
点击:
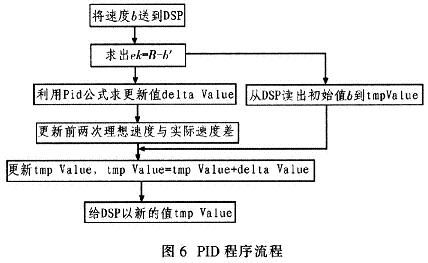
持一致或者到下一次赋值则停止更新(ek=O)。程序流程如图6所示,图6中,设右轮给定速度v对应的理想速度为V,仅限右轮电机,b’为给定速度b对应的实际速度。
4 试验
避障小车安装调试完成后,对小车性能进行测试:
1)小车的避障能力试验测试 错落摆放障碍物,让小车向障碍物方向前进,当距障碍物约25 cm时,小车左转,然后再向前(左方没有障碍物)。试验发现小车的传感器对亮色反映比较明显,比如遇到白色障碍物,小车会在30 cm外就发现障碍物并产生动作;当小车遇到黑色障碍物时,一般约在15 cm时才能感应到障碍物。
2)PID算法和PWM方法测试 分3次对小车进行测试,每次要求避开10个黑色障碍物。采用不加入PID程序和PWM程序的小车进行测试,小车3次分别避开6、7、7个障碍物;而采用加入PID程序和PWM程序的小车进行测试,小车3次分别避开9、10、9个障碍物。试验表明加入PID算法和PWM方法的小车在调速方面明显优于不加入程序的,并在遇到障碍物时和避开障碍物后都能够快速调速,使小车避障能力大大提高。
5 结论
本文对避障小车的设计进行分析后,提出了在DSPTMS320LF2407技术平台上实现小车自动检测前方障碍物,并给出躲避动作方法。避障车最终实现了从无障碍地区启动前进,利用车体前端传感器感应前进路线上的障碍物后,并且根据障碍物的位置选择下一步行进方向,避开障碍物。由于红外传感器探测信息有限(只能探测障碍物的有无,无法得到距离信息),不能够判断障碍物的距离、大小及形状等。如果使用摄像头作为视觉探测系统,则可使避障小车性能更好,应用范围更广泛。这也是后续研究方向。
发布者:小宇
- 基于DSP的移动机器人的设计与实现(09-25)
- 基于OpenWrt的移动机器人系统设计(01-17)
- 基于嵌入式Linux的移动机器人控制系统(09-09)
- 单片机应用系统开发实例(12-02)
- ATmega16与PC机的移动机器人定位系统研究(11-12)
- 基于arm2210开发板的移动机器人人机界面设计(11-05)