基于ARM7处理器LPC2104的嵌入式
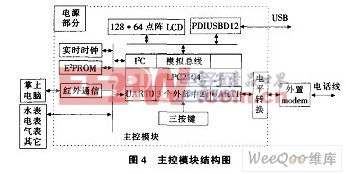
主控模块在整个系统具有很重要的作用,相当于人的中枢神经。以下就是对主控模块硬件和软件设计的具体介绍。
3.2 系统硬件设计
根据整个系统的设计思想,在对主控模块进行硬件电路设计时,处理器的选择是关键的问题。按照低功耗、低 成本、小体积、多功能的要求,Philips公司的LPC2104是一个非常好的选择。
由功能框图4可以看出,只需要 在 LPC2104周围增加较少的元器件和电路,就能设计出功能较强的、符合要求的主控模块的电路。
3.3 LPC2lo4引脚分配及模拟总线
LPC2104只有 64个引脚,无外部总线控制器 .因而它没有外部总线,外接扩展芯片不是很方便。不过因为它们的速度很快。所以即使使用软件模拟总线外接扩展芯片也比普通的单片机快得多。因此,我们应用LPC2104的模拟总线外扩芯片能够满足设计要求。
除了电源、复 位、晶振等引脚,LPC2104有32个功能复用的可编程的通用IfO 口(P0.0一P0.31)。在系统设计中。UART0 占用了 P0.0和P0.1;I2C 占用了 P0.2和 P0.3:UART1占用了 P0.8和 P0.9;按键占用了 P0.14和 P0.15。在剩余的引脚中 ,将 P0.17一P0.24这 8个连续的I/O 口来模拟八位数据/地址总线,P0.4模 拟地址锁 存信 号 ALE,P0.5模 拟读 信号 RD.P0.6模拟写信号 WR,如图5所示。
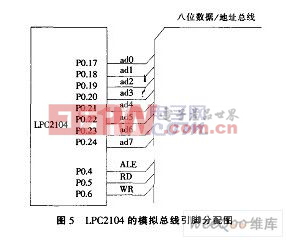
模拟总线是为 了弥补LPC2104无外部总线的缺点而设计的 。因为在总线操作的过程中,不能被中断,所以总线访问前后要关开中断 。要对模拟总线进行初始化。
3.4 人机交互部分
人机交互部分的设计本着使用最简化的原则,采用了点阵液晶显示模块和 3个按键的组合形式。液晶选用了信利的MG12864—7型点阵液晶模块,其显示容量为 128x64个点,体积 只有 54cmx50cmx6.5cm,内部带有一10v电压 产生器和EL背光逆变器 .使 用单 5V电源供电,非常适合便携式的产品应用。
由于液晶模块的工作电压为5V,LPC2104的 I/O 口电压是3.3V,所以需要在处理器和液晶模块之间加一片总线收发器 74LVC4245.如图 6所示。74LVC4245是一种双电源的总线收发器,同时工作在两种电源下:A端用5V电源作为VCCA,IfO 口接5V 器件的数字逻辑电路 ;B端用3.3V电源作为VC.CA.L/O 口接 3.3V 器件的数字逻辑电路 :DIR引脚可以控制总线的传输方向。这样,利用74LVC4245就能方便的实现3.3V和 5V系统之间的逻辑电平转换 。从电路图可以看出 ,当LPC2104通过模拟总线对液晶模块进行操作时 ,用 P0.7来控制数据 总线的方向。另外 ,液 晶模块根据节电的需要 .没有使用背光功能。

3个按键 通过逻辑与门与 LPC2104的两个外部 中断引脚连接 。按键部分就可采用中断的输入方式 ,减少了处理器轮询按键的工作量。更为重要 的是,可 以使用这两个外部中断的掉 电唤醒功能。这样 当处理器不工作的时候,可以进入掉电状态, 只有当处理器需要响应按键 的时候,按键的中断输入会使处理器从掉电模式唤醒 ,这样就大大降低了处理 器的功耗 。
3.5 通信 部分
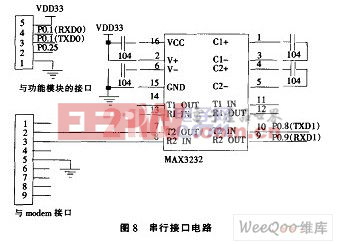
主控模块的通信分为 3个部分 :USB、UART0、UART1。USB用来连接主控模块和PC机,其驱动芯片 D12使用地址/ 数据总 线连 接方式 ,LPC2104使用外 部 中断 0,如图 7所示 。UART0用来与各个功能模块通信 ,其中包括红外通信模块。除了红外模块多需要一个 L/O 口(P0.25)来进行作为选择波特率的控制信号 外 .其它模块都 只需要 与 UART0的 TXD0、RXDO 和 GND三根线连接即可。UART1是用来与Modem通信的,外置 Modem 的接口是 RS232接 口, 这样需要将 UART1的TXD1、RXD1通过 MAX3232进行 电平转换后 与 Modem 相连 ,如图 8所 示

3.6 其它功能部件
LPC2104带有 I2c总线,可以很方便的外扩一些 I2C功能器件。为了能够存储用户个人信息 、少量生理数据 ,主控模块在 LPC2104的I2c总线 t扩展了一片 1K的E2PROM芯片CSI24WC08。 它 可 以在 3.3V电源 下工 作 .其 I2c总线地 址 为 :读 :0xA1、 o)(A3、o)(A5、o)(A7.写:o)(A0、o)(A2、0xA4、0xA6。
液晶显示面板 由主界面 、消息区两部分组 成 ,其中主界面 显示当前选择的功能参数设 置和当前状态 (进行/失败/取消 ),消息区显示当前联机状态 、错误原因等。整个面板设计与按键设计紧密结合 ,使用方便 ,所有功能均可在 1—3次按键 中完成,如图 10所示

4 系统软件设计
采用嵌入式实时操作系统 p~C/OS—II。使用 ARM 和 Thum指令集混合编译来优化代码密度 。
4.1 任务的分配和软件系统结构
采用嵌入式实时操作系统 p~C/OS—II。用户级有六个任务
(1)负责启动任务按键的响应。优先级 6;
ARM 相关文章:
- Linux嵌入式系统开发平台选型探讨(11-09)
- 基于ARM体系的嵌入式系统BSP的程序设计方案(04-11)
- 在Ubuntu上建立Arm Linux 开发环境(04-23)
- 达芬奇数字媒体片上系统的架构和Linux启动过程(06-02)
- SQLite嵌入式数据库系统的研究与实现(02-20)
- 革新2410D开发板试用手记(04-21)