FreeRTOS嵌入式实时操作系统
1 FreeRTOS操作系统功能
作为一个轻量级的操作系统,FreeRTOS提供的功能包括:任务管理、时间管理、信号量、消息队列、内存管理、记录功能等,可基本满足较小系统的需要。FreeRTOS内核支持优先级调度算法,每个任务可根据重要程度的不同被赋予一定的优先级,CPU总是让处于就绪态的、优先级最高的任务先运行。FreeRT0S内核同时支持轮换调度算法,系统允许不同的任务使用相同的优先级,在没有更高优先级任务就绪的情况下,同一优先级的任务共享CPU的使用时间。
FreeRTOS的内核可根据用户需要设置为可剥夺型内核或不可剥夺型内核。当FreeRTOS被设置为可剥夺型内核时,处于就绪态的高优先级任务能剥夺低优先级任务的CPU使用权,这样可保证系统满足实时性的要求;当FreeRTOS被设置为不可剥夺型内核时,处于就绪态的高优先级任务只有等当前运行任务主动释放CPU的使用权后才能获得运行,这样可提高CPU的运行效率。
2 FreeRTOS操作系统的原理与实现
2. 1任务调度机制的实现
任务调度机制是嵌入式实时操作系统的一个重要概念,也是其核心技术。对于可剥夺型内核,优先级高的任务一旦就绪就能剥夺优先级较低任务的CPU使用权,提高了系统的实时响应能力。不同于μC/OS-II,FreeRTOS对系统任务的数量没有限制,既支持优先级调度算法也支持轮换调度算法,因此FreeRTOS采用双向链表而不是采用查任务就绪表的方法来进行任务调度。系统定义的链表和链表节点数据结构如下所示:
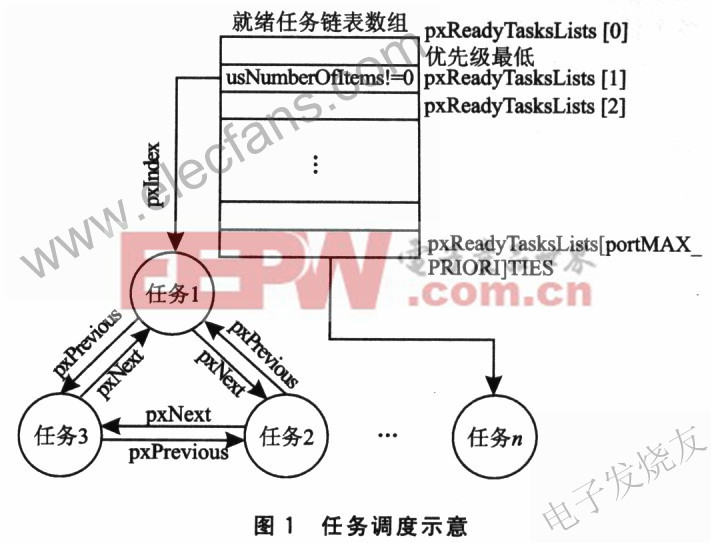
FreeRTOS定义就绪任务链表数组为xList pxReady—TasksLists[portMAX_PRIORITIES]。其中portMAX_PRIORITIES为系统定义的最大优先级。若想使优先级为n的任务进入就绪态,需要把此任务对应的TCB中的结点xGenericListltem插入到链表pxReadyTasksLiStS[n]中,还要把xGenericListItem中的pvContainer指向pxReadyTasksLists[n]方可实现。
当进行任务调度时,调度算法首先实现优先级调度。系统按照优先级从高到低的顺序从就绪任务链表数组中寻找usNumberOfItems第一个不为0的优先级,此优先级即为当前最高就绪优先级,据此实现优先级调度。若此优先级下只有一个就绪任务,则此就绪任务进入运行态;若此优先级下有多个就绪任务,则需采用轮换调度算法实现多任务轮流执行。
若在优先级n下执行轮换调度算法,系统先通过执行(pxReadyTasksLists[n])→pxIndex=( pxReadyTasks-Lists[n ]) → pxlndex→pxNext语句得到当前结点所指向的下一个结点,再通过此结点的pvOwner指针得到对应的任务控制块,最后使此任务控制块对应的任务进入运行态。由此可见,在FreeRTOS中,相同优先级任务之间的切换时间为一个时钟节拍周期。
以图1为例,设系统的最大任务数为pottMAX_PRIORITIES,在某一时刻进行任务调度时,得到pxReadyTasksLists[ i].usNumberOfItems=O(i=2...portMAX_PRIORITIES)以及pxReadyTasksLists。usNumberOfItems=3。由此内核可知当前最高就绪优先级为l,且此优先级下已有三个任务已进入就绪态.由于最高就绪优先级下有多个就绪任务,系统需执行轮换调度算法实现任务切换;通过指针pxlndex可知任务l为当前任务,而任务l的pxNext结点指向任务2,因此系统把pxIndex指向任务2并执行任务2来实现任务调度。当下一个时钟节拍到来时,若最高就绪优先级仍为1,由图可见,系统会把pxIndex指向任务3并执行任务3。
为了加快任务调度的速度,FrecRTOS通过变量ucTopReadyPriotity跟踪当前就绪的最高优先级。当把一个任务加入就绪链表时,如果此任务的优先级高于ucTopReadyPriority,则把这个任务的优先级赋予ucTopReadyPriority。这样当进行优先级调度时,调度算法不是从portMAX_PRIORIT
IES而是从ucTopReady-Priority开始搜索。这就加快了搜索的速度,同时缩短了内核关断时间。
2.2 任务管理的实现
实现多个任务的有效管理是操作系统的主要功能。FreeRTOS下可实现创建任务、删除任务、挂起任务、恢复任务、设定任务优先级、获得任务相关信息等功能。下面主要讨论FreeRTOS下任务创建和任务删除的实现。当调用sTaskCreate()函数创建一个新的任务时,FreeRTOS首先为新任务分配所需的内存。若内存分配成功,则初始化任务控制块的任务名称、堆栈深度和任务优先级,然后根据堆栈的增长方向初始化任务控制块的堆栈。接着,FreeRTOS把当前创建的任务加入到就绪任务链表。若当前此任务的优先级为最高,则把此优先级赋值给变量ucTopReadyPriorlty(其作用见2.1节)。若任务调度程序已经运行且当前创建的任务优先级为最高,则进行任务切换
- VxWorks实时操作系统下MPC8260ATM驱动的实现(11-11)
- VXWORKS内核分析(11-11)
- Linux内核解读入门(11-09)
- 嵌入式系统实时性的问题(06-21)
- 基于WinCE操作系统的通用USB数控键盘设计(08-05)
- 嵌入式实时操作系统设计探讨(10-15)