无线收发的声音导引系统
摘要:设计以STC89C58单片机为核心的最小系统。采用L297与L298控制、驱动步进电机;音频放大器采用CX20106芯片,信号频率选择、放大性能好;同时具有433 MHz无线接收发模块等。音频接收器接收小车发出的15 kHz音频信号,通过采集、放大、滤波等环节传送至接收端单片机;利用时间差作为变量,将对应的信息无线发送回小车处理器,控制小车移动到达预定位置。
关键词:声音导引;无线收发;运算放大;STC89C58
引言
声音引导在工业、民用等领域有着广阔的应用空间。本文基于主从两块单片机设计了声音引导电动小车运动系统。该系统由可移动声源(智能小车)和声音接收控制电路等组成。其主要功能是由声音接收控制电路接收并处理移动声源发出的声音信号,通过无线的方式向移动声
源控制电路发送方位、速度等信息,使移动声源达到预期的目标。系统的移动声源采用了步进电机驱动的小车,角度、位移控制较为精确。
1 系统硬件设计
系统硬件总体框图如图1所示。主控、从控单片机为宏晶科技的STC89C58。

1.1 电机驱动模块
电机驱动模块电路如图2所示。驱动模块采用L298驱动芯片和L297电机控制芯片。L298驱动芯片是性能优越的小型直流电机驱动芯片,可用来驱动两个直流电机或者是一个步进电机;在4~46 V的电压下,可以提供2 A的驱动电流。L298还有过热自动关断功能,并有反馈电流检测功能,符合电机驱动的需要。L297芯片为电机驱动的前级电路,主要用来产生格雷码,避免了用单片机引脚直接控制所造成的资源浪费。
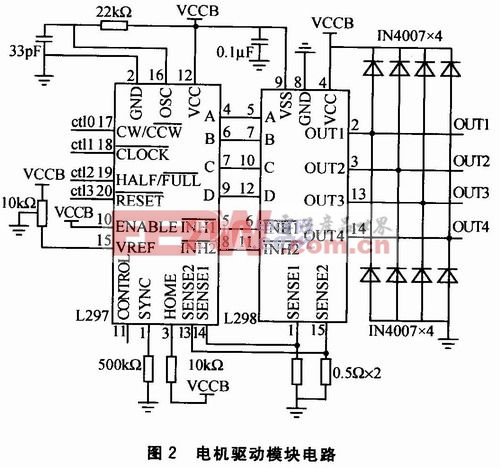
本系统采用的是步进电机。步进电机是将电脉冲信号转变为角位移或线位移的开环控制元件。在非超载的情况下,电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,即给电机加一个脉冲信号,电机则转过一个步进角。这一线性关系的存在,加上步进电机只有周期性的误差而无累积误差等特点,在速度、位置等控制领域用步进电机来控制变得非常简单。
采用步进电机作为电动车的电动机,可以通过脉冲控制实现速度与精度兼得。
1.2 声音发生装置
以扬声器作为车载声源加之多谐振荡电路,可以向声音接收器发送一定频率的声音脉冲。多谐振荡电路的应用可节省宝贵的单片机资源。
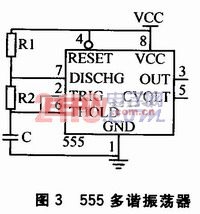
555定时器是一种模拟电路和数字电路相结合的中规模集成器件。它性能优良,适用范围很广,外部接少量的阻容元件就可以很方便地组成多谐振荡器,产生稳定的方波波形。由555定时器组成的多谐振荡器如图3所示。其中,R1、R2和电容C为外接元件。
多谐振荡波形如图4所示。
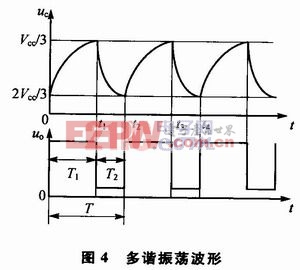
由图4可知,矩形波的振荡周期T=T1+T2。T1为电容充电时间,T2为电容放电时间。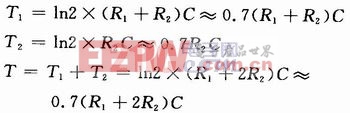
因此,改变R1、R2和电容C的值,便可改变矩形波的周期和频率。
1.3 声音接收及处理模块
采用具有带通功能的集成芯片CX20106进行信号处理。CX20106的总放大增益约为80 dB,输出的控制脉冲序列信号幅度在3.5~5 V范围内。总增益具有可调性,虽然增益取值过大时将造成频率响应变差,但仍能满足系统要求。经过实验,CX20106作为声音信号处理芯片的抗干扰能力极强,且电路最为简洁。其内部结构如图5所示。
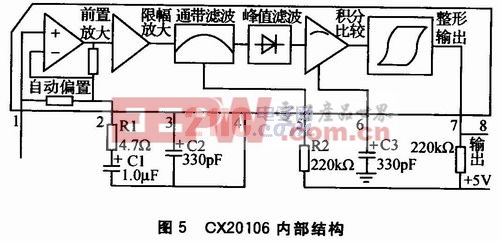
前置电路将接收到的信号转换成CX20106可以接收的标准数字信号,送到CX20106的1脚。CX20106的总放大增益约为80 dB,其7脚输出的控制脉冲序列信号幅度为3.5~5 V。总增益大小由2脚外接的R1、C1决定,R1越小或C1越大,增益越高。但取值过大时将造成频率响应变差,C1为1.OμF。采用峰值检波方式,检波电容C2为3.3 μF。R2为带通滤波器中心频率的外部电阻。
积分电容C3取330 pF。经CX20106处理后的脉冲信号由7脚输出。
1.4 无线收发模块
1.4.1 无线发射模块
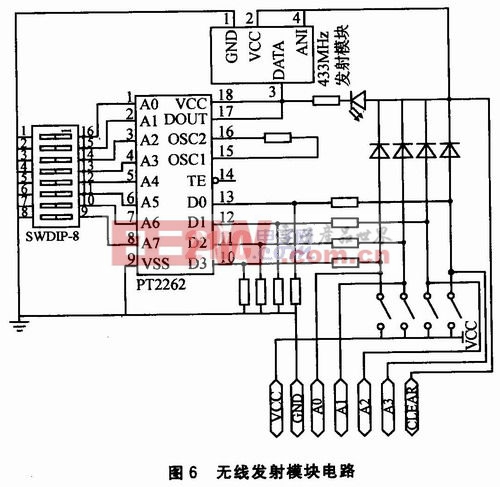
无线发射模块电路如图6所示。编码采用PT2262芯片,它将载波振荡器、编码器和发射单元集于一身,使发射电路变得非常简洁。编码输入是4路独立的二进制信号,把误差信号转换为4位数字信号通过433 MHz发射模块进行发射。
1.4.2 无线接收模块
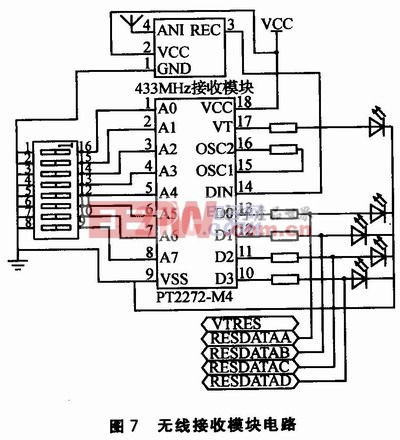
无线接收模块电路如图7所示。解码芯片采用PT2272-M4芯片,对433 MHz接收模块接收到的信号进行解码。433 MHz接收模块上集成有超外差接收装置,其具有较好的选择性和频率特性,且容易调整。PT2272-M4的数据输出位因其后缀而异,数据输出具有暂存和锁存两种方式,方便用户使用。后缀为M为暂存型,后缀为L为锁存型,其数据输出又分为0、2、4、6不同的输出。
2 软件设计
声源引导示意图如图8所示。设S点为可移动声源,Ox代表AB直线的中垂线,O'y代表AC直线的中垂线。如果AS距离大于BS距离,则小车向9点钟方向前进;如果AS距离小于BS距离,则小车向3点钟方向倒车;如果AS等于BS,则说明小车在AB的中垂线上。如果AS距离大于CS距离,则小车向6点方向前进;如果AS距离小于CS距离,则小车向12点钟方向倒车;如果AS等于CS,则小车到达W点。
单片机 相关文章:
- FPGA的DSP性能揭秘(06-16)
- 基于单片机通用引脚的软件UART设计(10-16)
- 分时操作系统思想在单片机中的具体应用 (10-30)
- 基于AT89C51+DSP的双CPU伺服运动控制器的研究(05-26)
- 关于RTX51 TINY的分析与探讨(05-30)
- 基于MC9S12DGl28单片机的智能寻迹车设计(04-03)