基于ARM9处理器S3C2410的数字多路语音记录器
1. 引言
数字多路语音记录器在安全、监控方面有很多应用。一些传统的设计方案基于工控机,用数据采集卡实现语音的A/D转换,用软件实现语音编解码,这种方案成本高、功耗大。如果采用嵌入式的设计方案,可以实现同样的功能,并且具有低成本,低功耗的特点。
普通的低成本嵌入式处理器性能不高,不足以实现多路语音的实时编码、解码,需要用专门的语音处理芯片完成这一工作。基于DSP自主设计语音编码器是一种方法,但工作量大。AC48304广泛应用于各种小型VOIP网关中,价格低廉,是一种很好的替代方案。同时AC48304还具有DTMF识别和静音检测等功能,便于实现电话号码识别和语音的自动记录。
ARM是一种应用广泛的嵌入式处理器,Samsung、Atmel等厂家生产的ARM处理器接口丰富,技术支持全面。ARM处理器价格低、性价比高,向下取代了大量单片机的应用,向上渗透高端嵌入式处理器的市场。在本多路语音记录器中,采用了Samsung的ARM9处理器S3C2410,操作系统则采用了嵌入式linux。
2. 系统结构
语音记录器包括语音处理模块、ARM系统模块、硬盘记录模块、网络接口模块几个部分。为使系统配置灵活,将系统设计为主控板和扩展板两个部分,在主控板上实现16路语音通道,另设计一个16通道的语音扩展板,整个系统可以用4的倍数进行语音通道的扩展,最多达到32个语音通道。计算机控制部分集成S3C2410 处理器、64MB SDRAM及16MB 的FLASH,构成一个嵌入式小系统。
语音CODEC采用AMD的LE58QL021,该器件是3.3V单电压用户线语音处理器,在小型语音网关中是AC48304的常用搭配,支持4通道语音AD/DA,支持E1 PCM Highway,能与AC48304实现无缝连接。LE58QL021的工作模式可软件编程控制,ARM通过MPI(Microprocessor Interface)串行控制总线设置LE58QL021的各种工作参数。
基于DM9000网络控制器,系统实现10/100Mbps自适应以太网接口,Linux操作系统提供设备驱动支持。IDE接口则是由一片CPLD实现,硬盘用于语音的本地记录。主要部分电路原理见图1。 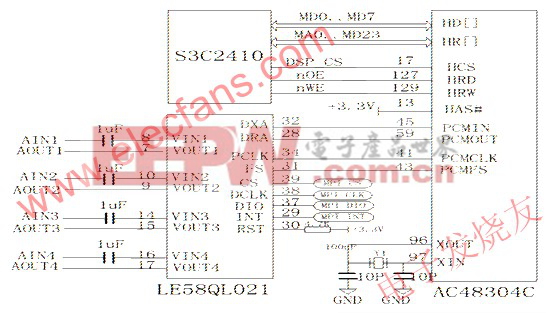
图1 语音处理模块的硬件电路原理图
3. AC48304语音处理器
AC48304是AudioCodes公司基于DSP设计的一个四通道语音处理器,支持多种标准、多种码率的G系列语音编码器,如G.723.1,G.711,G.726和G.729等,支持T.38传真中继和其他语音信号处理功能。在系统中,ARM通过CPU局部总线实现对AC48304的控制及数据交换。AC48304与LE58QL021之间通过E1 PCM Highway接口实现多通道数字语音接口。E1接口由2.048Mhz时钟驱动,有031共32个8位时隙,工作时序如图2所示。 
图2 PCM Highway时序
AC48304是一种专用的语音处理DSP芯片,需要运行相应的DSP程序。正常运行前, AC48304有两个程序需要下载:kernel(内核)程序和application(应用)程序。kernel程序是个只有几百字节的小程序,完成DSP的初始化工作,为下载应用程序做准备。application程序则完成AC48304的所有功能,在kernel程序程序下载完成后,才可以下载application程序。AC48304有4个工作模式:内核下载模式、程序下载模式、初始化模式、运行模式。其中运行模式有两个状态:空闲状态和激活状态,用户只能在空闲状态改变芯片的工作参数。
4. 软件设计
4.1Linux中的驱动程序设计
操作系统采用的是嵌入式Linux操作系统。Linux具有效率高、内核小的优点,且开放源代码,完全免费。在Linux操作系统下,应用程序不能直接访问硬件,尽管Linux在ARM平台上有较完整的板级支持包,但在该系统的开发工作中仍然要完成部分设备的驱动程序设计,包括AC48304驱动程序、LE58QL021驱动程序、S-EEPROM驱动程序等。
设备驱动程序要为应用软件提供设备打开、关闭、设备控制及数据读/写等接口, 即一些类似于open、close、read和write的函数,在主程序中直接采用文件读写的方式实现数据的收发。LE58QL021与ARM处理器之间采用MPI串行控制总线,MPI驱动接口结构定义如下:
static file_operations mpi_ctl_fops = {
ioctl:mpi_ctl_ioctl, //设备控制
open:mpi_open, //打开设备
close:mpi
_ close, //关闭设备
}
linux提供ioremap函数将I/O内存资源的物理地址映射到核心虚地址空间,然后可像操作寄存器那样进行数据读写。编写驱动程序的时候,必须提供两个函数,一个是module_init(),insmod在加载此模块的时候自动调用,负责进行设备驱动程序的初始化工作,一个函数是module_exit,在模块被卸载时调用,负责进行设备驱动程序的清除工作。
4.2 AC48304的数据读写实现
每个AC48304可同时进行4个通道的语音编/解码,片内有数据缓存区,编码后的语音数据先存储在各通道的缓存区,然后依次拷贝到输出缓冲区。表1为本系统支持的几种主要语音编码格式的相关参数。其中G.711的A/u律数据量最大为64kbps,每个通道每秒有8000字节的数据,而AC48304的数据读取区的有效量为80字节,即每秒钟要进行100次的读取操作,对每个AC48304而言每秒钟要进行400次读取操作才能保证数据及时读取。由于语音编码包是以恒定的速率产生的,因此每2.5毫秒必须对DSP进行一次读取操作。本平台的Linux内核中,进
程调度算法的时间单位为10毫秒,在进程中执行数据的读取操作很难保证数据及时读取,如果某个服务进程或者是本进程中的某个控制操作执行时间过长,就会造成语音数据的丢失。
表1:语音数据特性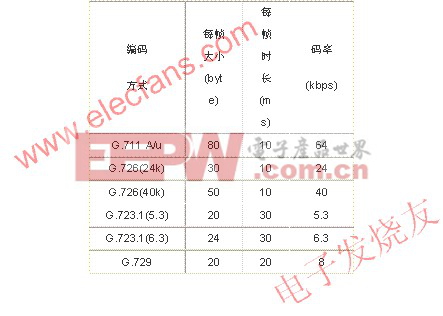
Linux中程序运行的环境分为内核空间和用户空间,内核空间的程序优先级高于用户空间。为保证编码数据被及时读取,需在内核级别的进程中定时读取AC48304产生的数据。有两种方式可将用户程序加入到内核空间中运行:修改Linux内核源代码,直接将用户程序代码编译到内核中;利用Linux的模块机制,动态的将用户程序代码添加到内核空间中运行。第一种方法实现难度比较大,而且容易出错。第二种方法实现难度小,效果与第一种相同,本系统中采用的是第二种方法。
将AC48304的读取操作作为驱动程序进行设计,使用insmod命令动态加载到内核中去,在定时中断的服务函数中读取AC48304的数据。S3C2410中有5个用户可编程的时钟中断,中断优先级别高,中断的频率可编程控制,其中时钟中断Timer3已用于DMA控制,Tmer4用于进程调度。本系统的程序设计中使用Timer2,通过配置相关控制寄存器将Timer2的中断频率设为500HZ,适当的增加读取查询操作频率,保证数据及时读取。中断服务函数是由内核来执行的,优先级高于用户程序,可保证读取操作的实时性。为AC48304的每个通道分配一个数据缓冲区,定时中断函数中读取的数据先保存在缓冲区中,用户程序通过读取该缓冲区获得语音数据,这样对外部用户而言,语音数据没有丢失,语音延迟在毫秒级别,完全可以满足需求。
4.3 应用软件设计
将应用程序及驱动程序文件加入文件系统中,修改有关启动的配置文件,使得系统启动完毕时自动加载目标程序,这样每次设备启动时将自动进入应用程序。主程序流程如图3所示,主程序的功能主要是:
u 系统配置:系统的配置表存储在一片S-EEPROM中,配置表可以通过串口终端或者网络在线配置。
u 初始化系统:包括向DSP下载内核程序和应用程序,启动DSP及LE58QL021等。
u 语音数据读写:通过DSP的HPI总线读取DSP数据实现语音采集,通过HPI把数据写入DSP实现语音回放。
u 数据存储:根据录音计划将需要录音的语音数据保存到硬盘中。
u 命令处理:包括选择语音通道命令、回放命令、校时命令、增益调节命令、配置表传输命令、录音数据上传命令等。 
图3.主程序流程图
5. 结束语
本记录器最多支持32路语音实时处理,在硬盘上实现长时间录音,并可通过10/100Mbps以太网实现数据上传和管理。经测试本记录器可以很好的完成语音数据的采集、压缩、存储、解压缩和回放,内核级别的用户进程运行正常,保证了整个系统的实时性。该语音记录器具有低成本、低功耗、结构精简、使用简单的特点,具有很好的实用价值。
语音 记录 数字 S3C2410 ARM9 处理器 基于 相关文章:
- 基于TMS320VC5509A的语音识别与控制系统(06-17)
- 基于DSP的声控电子记事本的设计与实现(09-22)
- 基于DSP的安全无线多媒体数字终端(03-03)
- 基于DSP的通用型嵌入式语音平台的硬件设计(03-27)
- SN2005学习系统 数字语音室解决方案(05-19)
- 嵌入式语音通信系统中VxWorks BSP的设计实现(09-18)