基于DSP的交流电机伺服控制器设计
率管、电压取样与比较电路以及驱动电路组成。由于电压较大,应选用电流互感器将电流采样后转换为0~3 V的电压,经过2812的AD单元后与设定值进行比较,如果达到要求,则2812输出一路信号通过光电耦合器后驱动功率管打开,进行能耗制动。功率管经常选用GTR或IGBT,但本系统功率较小,选用功率较大的三极管即可。要求如下:
2.5 电流采样电路
系统中的电流检测环节是电流传感器,该电流传感器是利用霍尔效应和磁平衡原理制成的一种电流传感器,能够测量直流、交流及各种脉冲电流,同时在电气上高度绝缘。经过霍尔电流传感器,需要检测的电流信号按比例缩小为电压信号,为了防止后续电路对这个电压检测信号的干扰,系统利用运算放大器“虚短”和“虚断”的原理设计了电压跟随器,霍尔元件检测到电流信号后,由于电压PWM调制的影响,波形不可避免地会有一些毛刺,所以需要加一个低通滤波器,采用二阶压控型低通滤波器。滤波电路的输出在进入DSP和AD环节之前,为了防止电压太大损坏DSP,还需经过一个钳位电路,DSP芯片使用3.3 V 供电,因此系统设计了3.3 V钳位电路,使得输入AD转换模块引脚的模拟信号不超过3.3 V,如图2所示。

2.6 光电编码电路
测速是速度闭环控制系统的关键。本系统采用光电编码器,有A相、B相、Z相三路输出。其中A相与B相用于测速,它们的相位差为90°,每转一圈输出2 048个脉冲;而z相脉冲为每转一圈输出一个脉冲;脉冲的幅值为15 V。光电编码器的A 相和B相经光电隔离后进入74LS14转换成幅值较低的脉冲信号,输入到DSP的编码器接QEP1和QEP2引脚。其电路图如图3所示。

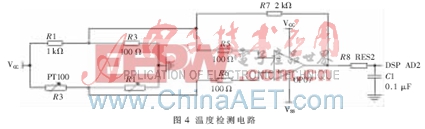
2.7 温度检测电路
电路中R1、R2、R3采用精密电阻,用来减小温漂影响。为了消除由于铂热电阻阻值较小、受连接导线的电阻及接触电阻对测量精度产生的影响,采用三线制接法,调整R1可以使电桥平衡。将电桥输出接入OP07,反相放大40倍后接入DSP的AD单元。通过计算出铂电阻阻值,在系统运行时,先查表得出特定温度铂电阻的阻值(如100℃),当计算的铂电阻阻值大于这一阻值时,停止DSP工作并报警,保护相关的元器件。如图4所示。
3 DSP与硬件部分的连接
在本系统中,DSP的主要功能是根据需要驱动逆变桥的6个开关管的通断并且根据采样信号来打开或关断能耗制动电路的功率管[5]。由于DSP输出的PWM信号驱动能力较弱,且为了实现低压数字电路和高压模拟电路之间的电气隔离,需要采用光耦隔离,另外,DSP芯片输出信号频率较高,需要反应速度较快的光耦。通常按低电平开通高电平截至的原则设计接口电路。实际应用中,某些开关可能不用,但输入信号加上拉电阻可以保证其关断。
实验结果表明,系统达到了预期的设计目标,得到的实验数据体现了硬件实现的可行性,为下一步的实际运用打下了良好的基础。
- 一种低容量可逆调速系统的设计方案(12-06)
- 基于单片机的数字正弦逆变电源设计(11-18)
- Windows CE 进程、线程和内存管理(11-09)
- RedHatLinux新手入门教程(5)(11-12)
- uClinux介绍(11-09)
- openwebmailV1.60安装教学(11-12)