基于TMS320VC33的磁悬浮列车速控系统
时间:12-07
来源:互联网
点击:
6245的数据方向的同时,还必须兼顾I/O接口板的数据流方向。
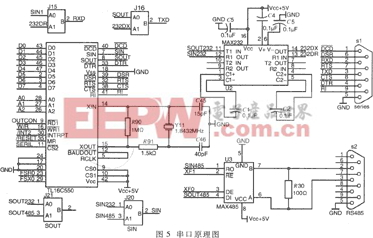
3.4 串口设计
DSP系统板需要采集来自RS485端口的速度位置信息。DSP自身带有串口引脚,但其传输为同步方式,无法与异步方式的RS485接口相连。因此选用有自动流控功能的异步通信芯片TL16C550C实现DSP的串口通信(见图5)。
TL16C550C(ACE)在从外设或Modem接收数据时实现从串口到并口的转换,当从CPU接收数据时实现并口到串口的转换,CPU可在任何时候读取芯片的状态。ACE包含完全的Modem控制能力和处理器中断系统,可配合来最小化通信连接软件管理。
ACE包含波特率发生器,可对输入时钟分频和倍频,规则包含了接收器的16倍频时钟,ACE有1M波特的串口传输率,因此每一位耗时1μs,一个字节耗时10μs。
ACE包含了12个完全可访问的寄存器,DSP可通过对这些寄存器的读写操作控制ACE的工作状态。用A0~A2选择寄存器地址,D0~D7读写寄存器内容。
ACE可直接进行9线模式的串口通信。为提高串口的驱动能力,适应RS232和RS485标准,额外为其增加了两片串口芯片MAX232、MAX485,使DSP板通过串口传递信息时不再需要额外的设备。通过跳线进行不同串口通信模式的转换。
3.5 地址的分配与选通
上面介绍的存储区、数字I/O端口、串口都需要占用DSP的16M地址空间,合理分配地址和选通引脚成为关键。VC33提供了一个专用的地址选通引脚STRB,它与预解码引脚PAGE0~PAGE3配合使用,能够快速访问特定地址。本系统的地址分布比较复杂,使用GAL20V8B进行逻辑运算。表2是地址空间分配表。

系统 列车 磁悬浮 TMS320VC33 基于 相关文章:
- Linux嵌入式系统开发平台选型探讨(11-09)
- VxWorks实时操作系统下MPC8260ATM驱动的实现(11-11)
- VXWORKS内核分析(11-11)
- Linux内核解读入门(11-09)
- linux文件系统基础(02-09)
- 基于Winodws CE的嵌入式网络监控系统的设计与实现(03-05)