14位A/DMAX194在ARM单片机系统中的设计
引言
为了实现计算机的自动测量与控制,越来越多的领域采用了A/D转换技术。随着大规模集成电路芯片技术的发展,速度更快、精度更高、使用更方便的集成电路芯片层出不穷。本文介绍了一种笔者使用后取得良好效果的新型A/D转换芯片—MAX194。另外,由于32位处理器的价格不断下降,用户已可以大量使用,而32位RISC处理器则更是受到青睐,并将在某些领域替代原来的8位单片机。其中,ARM嵌入式微处理器系列处于领先地位。笔者所介绍的数据采集系统中采用的是PHILIPS公司生产的以ARM7处理器作为内核的LPC2104单片机。
1 MAX194简介
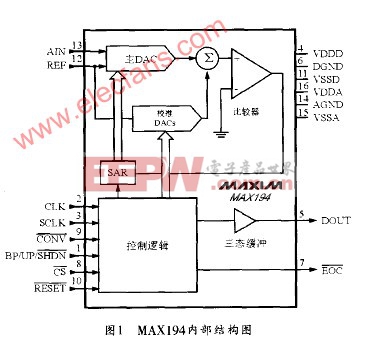
MAX194是MAXIM公司推出的一种逐次逼近型模数转换器(ADC),具有高速、高精度、低功耗等特点。MAX194内部设有校准电路,用于保证全温度范围内的线性度,从而维持全量程内的高性能,且不需要外部的调整电路。分开的模拟和数字供电最大程度地减少了数字噪声耦合。MAX194的内部结构如图1所示,其主要特性如下:
◇ 14位分辨率,1/2LSB非线性度,82分贝的信噪比;
◇ A/D转换时间为9.4 μs;
◇ 低功耗,节电模式下仅为10 μA;
◇ 内置采样/保持器(T/H);
◇ 单极性(0~VREF)或双极性(-VREF~VREF)输入;
◇ 3态串行接口输出;
◇ 与16位的A/D转换器MAX195引脚兼容、输出数据格式相同,便于升级。
1.1 MAX194的主要引脚功能
◇ BP/UP/SHDN:三态输入选择端。0 V为关断,+5 V为单极性,浮空为双极性;
◇ CLK:转换时钟输入端;
◇ SCLK:串行时钟输入端。用于移出数据,可以与CLK异步;
◇ DOUT:串行数据输出端。高位先出;
◇ EOC:转换结束信号输出端。转换开始时上升,结束时下降;
◇ CS:片选输入端。当为低电平时允许三态数据输出;
◇ CONV:转换开始输入端。在波形的下降沿开始转换;
◇ RESET:复位输入端;
◇ REF:参考电压输入端;
◇ AIN:模拟量输入端。
1.2 工作模式
MAX194有两种接口模式。
◇ 同步模式:MAX194在转换过程中,每转换完成一个,数据位就输出一位。此时,SCLK应该接地,CLK既作为ADC的转换时钟又作为串行接口的移位输出时钟。
◇ 异步模式:单片机只能在MAX194完成一次转换之后才能将转换结果读出,然后再启动下一次转换。这种模式降低了MAX194连续转换的速度。
1.3 硬件接口
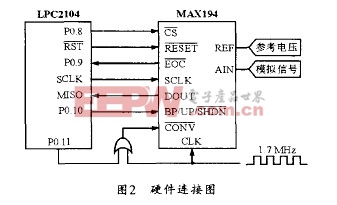
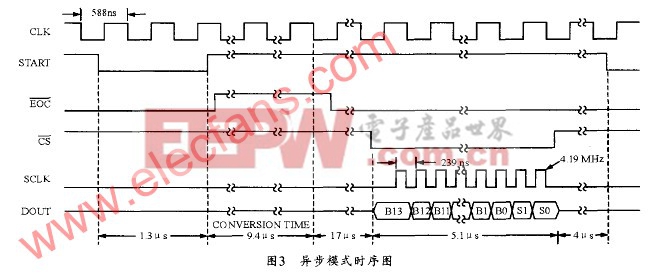
串行接口标准与SPITM、QSPITM兼容。MAX194在进行A/D转换时需要由外部提供时钟信号。图2是MAX194与单片机采用异步模式的硬件连接图。该图中,MAX194进行A/D转换所需的时钟信号由外部晶振分频得到。使用者也可根据需要由单片机提供该时钟信号。时钟信号的最大频率是1.7 MHz,参考电压的范围是0~VDDA+0.3 V。为了防止从AIN端输入的信号损坏ADC,应在信号输入端加电压限幅电路以保护MAX194。图3是其时序图。P3.0产生的START信号与CLK信号相“或”后作为启动转换的CONV信号。CONV的下降沿可以启动转换,开始转换后监测EOC,当它由高电平变低时说明转换已经结束,适当延时后就可以从串口读出转换结果,读数据的最高速率是4.19 Mbps。
2 LPC2104芯片简介
LPC2104 包含一个支持仿真的ARM7TDMI-S CPU、与片内存储器控制器进行接口的ARM7局部总线、与中断控制器接口的AMBA高性能总线(AHB)以及用于连接片内外设的VLSI外设总线VPB与ARM7 高级外设总线相兼容的超集。主要特点有:128 K 片内Flash 程序存储器带ISP 和IAP 功能;Flash 编程时间1 ms;可编程512字节;扇区擦除和整片擦除只需400 ms;16 K 静态RAM;向量中断控制器;仿真跟踪模块支持实时跟踪;标准ARM 测试/调试接口兼容现有工具;双UART的其中一个带有完全的调制解调器接口;高速I2C 串行接口400 kB/s;SPI 串行接口;两个定时器分别具有4 路捕获/比较通道;多达6 路输出的PWM 单元;实时时钟;看门狗定时器;通用I/O 口;CPU 操作频率可达60 MHz。
3 MAX194与LPC2104接口设计
3.1 硬件接口
MAX194和LPC2104都带有标准的SPI接口,可以非常方便地实现它们的硬件和软件接口。其硬件接口如图2所示。SPI 是一个全双工的串行接口,它被设计成用于处理在一个给定总线上多个互连的主机和从机。在一定数据传输过程中,接口上只能有一个主机和一个从机通信。在一次数据传输中,主机总是向从机发送一个字节数据,而从机也总是向主机发送一个字节数据。
在该系统中,LPC2104设置为主机,MAX194设置为从机主机操作。
3.1 软件实现
软件的流程图如图4所示。主要分为三大部分。

1、SPI配置部分:首先,配置LPC2104的SPI引脚模块;随后,设置SPI_SPCCR和SPI_SPCR,并将LPC2104的SPI模块设置为主模式,MSB(最高位)先传输,禁
- McBSP技术在数据传输中的应用(10-23)
- TI DSP入门芯片TMS320F28335(07-22)
- 51单片机驱动ADC0832模数转换程序-lcd1602显示(12-02)
- ADC0832模数转换51单片机程序与电路图(11-30)
- 模数转换ADC0832、ADC0808和ADC0809的利用(11-30)
- ADC0832模数转换MSP430单片机程序+电路图(11-30)