雷达天线方向图自动测试系统设计
天线是雷达的重要组成部分,天线方向图的测试在雷达性能测试中占有极其重要的位置。早期人们采用手动法进行方向图测量,数据的录取、方向图的绘制以及参数的计算都是手工方式,操作复杂,工作量大,耗时长,精度低。随着微电子技术和计算机技术的飞速发展,天线方向图自动测试逐渐取代了手动测量,实现了信号录取、数据处理以及方向图绘制的自动化,大大提高了测量速度和精度。本文介绍了一种雷达天线方向图的自动化测量系统,分析了软硬件结构及原理。
1 方向图自动测试原理及实验配置
根据天线的互易性原理,将被测天线作为接收天线,固定的辐射天线作为发射天线,由发射天线发射电磁波,转动被测天线进行接收,测出被测范围内不同角度处的信号电平,便可得到被测天线的方向图[1]。
方向图的自动测量与手动测量原理相同,不同的是利用电子和计算机技术,实现了数据采集、处理和方向图绘制的自动化。图1是某雷达天线方向图自动测试的实验配置。
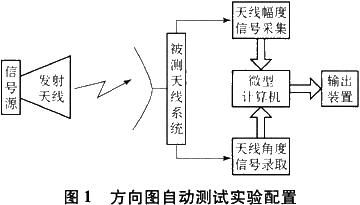
方向图的自动测量属于动态测量。测量时被测天线连续转动,并接收信号源通过喇叭天线发射的微波信号。接收信号送天线幅度信号采集电路,经变换放大及 A/D转换后送
给微机。天线转动的同时,天线角度信号录取装置将天线位置转换成角度数字信号送给微机。这样就可以得到测量范围内每一位置的幅度信号电平,根据这组数据,微机就可以进行数据处理并由输出装置输出计算结果。
2 硬件电路设计
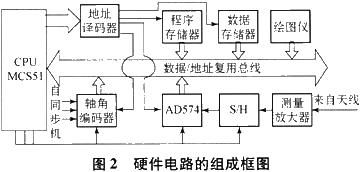
系统硬件包括微机控制部分、天线幅度信号录取装置、天线角度信号录取装置和绘图仪。组成框图如图2所示。
2.1 微机控制电路
微机控制电路采用51系列单片机,由CPU、程序存储器、外部数据存储器和地址译码器等组成[2]。
2.2 天线幅度信号录取装置
幅度信号录取装置由测量放大器、采样/保持电路s/H和A/D转换电路组成。
天线接收的微波信号送至测量放大器,对微波信号进行高频检波,输出调制方波信号,然后进行放大、检波、滤波等处理,输出一个幅度满足要求、波形较好的直流信号。该信号经采样S/H后送到A/D,A/D在单片机控制下将模拟信号转换成数字信号,并存入外部数据存储器,从而完成幅度信号的录取。
测量放大器是该系统的信号变换放大电路,有较高的灵敏度、大的动态范围、稳定的工作特性和快的响应速度。
S/H的选取原则是:如果在A/D转换期间输入信号电平的变化小于1个LSB,可以不加S/H;否则,必须加S/H。下式是不加S/H时信号变化率应满足的关系:
式中: 关系式为信号变化率的绝对值;Vm为A/D的满度电压;n为A/D的位数;T为A/D的转换时间。
关系式为信号变化率的绝对值;Vm为A/D的满度电压;n为A/D的位数;T为A/D的转换时间。
A/D芯片采用AD574,其参数为:Vm=10 V,n=12,T=25μs,代入式(1)得 关系式。雷达波束的最大变化率不小于10 V/(。),天线转速一般不小于2 r/min,信号电压变化率不小于:10 ×(2 × 360/60)=120 V/s,超过极限值97.7 V/s,所以必须加S/H。
关系式。雷达波束的最大变化率不小于10 V/(。),天线转速一般不小于2 r/min,信号电压变化率不小于:10 ×(2 × 360/60)=120 V/s,超过极限值97.7 V/s,所以必须加S/H。
AD574具有量化误差小(2.44 mV)、动态范围大(72 dB)、转换速度高(25μs)等优点。
2.3 天线角度信号录取装置
天线角度信号的录取由单片机控制轴角编码器完成。轴角编码器直接从天线传动机构的同步接收机三相绕组和激励绕组上取信号,输出12位角度数字信号。与一般角度编码器相比,它采用跟踪型闭环回路,具有跟踪速度快、精度高等优点,其原理见图3。

同步机上三相绕组的电压经三相/二相变压器得到两相电压V1和V2:
式中:υm为电压幅值;ω为同步机绕组电压的角频率;θ为天线转过的角度。
V1和V2在正余弦乘法器中分别与cosφ和sinφ相乘(cos φ和sinφ是正余弦函数发生器产生的,φ为计数器的数字量),然后在误差放大器中进行相减、放大得:

式中:k为误差放大器的放大倍数。
该信号经相敏检波后输出误差信号θ-φ,再经积分器积分后控制压控振荡器使θ-φ趋于0,此时可逆计数器输出代表角度θ的数字量。
该轴角编码器可输出12位角度数字信号,具有很高的角度分辨力。从粗同步机上取信号时,最小可分辨角度为:6 000/212=1.46密位。为进一步提高分辨力,从精同步机上取信号,由于粗、精转速比为1:20,最小可分辨角可达到1.46/20=0.073密位。
采集间隔越小,测量精度越高,但最小采集间隔受天线转动速度、A/D转换时间和必要的数据处理时间的限制。本系统采用等角度间隔采集,采集间隔为23×0.073=0.58密位。
3 软件设计
3.1 软件构成及执行流程
系统的软件由信号采集、数据处理和方向图参数计算及绘图3部分组成。
信号采集程序包括幅度信号录取程序和角度信号录取程序,也就是A/D和轴角编码器的启动和数据输出程序。采集的天线幅度信号存入外部数据存储器;由于绘制方向图和参