基于WinCE的GPS导航数据提取的设计与研究
采用NEMA0183语句)主要由帧头、帧尾和帧内数据组成。根据数据帧的不同,帧头也不相同,主要有“$GPGGA”、“$GPGSA”、“$GPRMC”等。这些帧头标识了后续帧内数据的组成结构,各帧均以回车符和换行符作为帧尾识别一帧的结束。本文中,定位数据经纬度、速度、时间等均可以从“$GPGGA”帧中获取得到。该帧的结构及各字段释义如下[4]:
$GPGGA,1>,2>,3>,4>,5>,6>,7>,8>,9>,10,11>,12>,13>,14>*hh
1>当前位置的格林尼治时间
2>纬度值
3>纬度标识,N或者S(南北)
4>经度值
5>经度标识,E或者W(东西)
6>卫星接收信号质量
7>正在使用卫星的数量
2.1 GPS导航数据有效性确认标准
GPS定位的基本原理是根据高速运动卫星的瞬间位置作为已知的起算数据,采用空间距离后方交会的方法确定待测点的位置。假设t时刻在地面待测点安置GPS接收机,可以测定GPS信号到达接收机的时间,加上接收机所接收到的卫星星历等其他数据可以确定以下4个方程式。卫星定位示意图如图3所示。
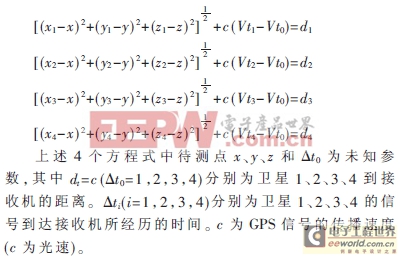
xi,yi,zi(i=1,2,3,4)分别代表卫星1、2、3、4在t时刻的空间直角坐标,可由卫星导航电文求得,Vti代表卫星钟差,Vt0为接收机的钟差。
由以上4个方程式可计算出待测点的坐标x、y、z和接收机的钟差Vt0。因此导航数据能够有效计算必须保证接收到4个卫星的星历。对固定格式的导航电码中提取卫星符号进行确认,如果满足4个卫星的接收状态即可确定当前接收的导航电码可用于数据处理。通常,3颗卫星可以在二维平面上得到经度纬度坐标,为精确起见,4颗卫星可以保证获得三维空间坐标。
2.2 有效数据提取和数据格式转化
有效数据的提取和数据格式转化都是在回调函数中进行的[5]。帧内各数据段由逗号分割,因此在处理缓存数据时,可以通过搜索ASCII码“$”来判断是否是帧头。对帧头类别进行识别后,再通过对所经历逗号的个数计数来判断当前处理的是哪一种定位导航参数,并做相应的处理。eVC支持CString类型格式,由于定位信息格式固定,本文先利用mbstowcs函数将缓存中的字符型数据转换为宽字符型,然后强制转化为字符串类型。
WCHAR wszbuf[512];
mbstowcs(wszbuf,(char*)buf,strlen((char*)buf));字符串类型进行处理,然后利用Find函数,搜索"$GPGGA",
strRecv.Find(_T("$GPGGA"),1);
state=strRecv.Mid(pos+37,1);
得到GPS 质量指示指标
strSatelliteNum=strRecv.Mid(pos+39,1) ;
得到接收到的卫星数量字符,将卫星数量字符型转化为整型判断卫星数量是否大于4,作为判断是否为有效数据的标准。
int iSatelliteNum=atoi((LPSTR)(LPCTSTR)strSatelliteNum);
当iSatelliteNum>3 state = =‘1’时说明接收到的是有效数据,可对strRecv中的数据进行提取,并赋给经纬度和时间变量。
strLatitude =strRecv.Mid(pos+16,8);
strLongitude=strRecv. Mid(pos+27,9);
将提取到得经度纬度字符型数据转化为浮点型数据,通过atof函数实现。
double Longitude_new = (atof(strLongitude))/100;
double Latitude_new = (atof(strLatitude))/100;
这样将经度纬度信息提取到GPS结构数组中,后续的处理和高层决策可根据该结构中存储的数据作出相应的处理。
3 程序运行结果分析
程序运行后,在实验平台上收集的部分数据如表1所示。

对以上结果分析,可知通过串口在不同时段接收的数据是比较稳定的,能够以此为基础提取到有效的数据和定位信息,本系统结合超图格式(pwr,pmw)的北京市公交站点地图数据,在编写程序时调用超图接口函数打开电子地图数据,将串口接收到的数据读入,得到附近的公交站点并以文本方式输出到界面。
本文结合相关程序代码陈述了基于eVC环境下串口通信程序的设计,对GPS全球定位系统定位信息的接收和数据提取进行了详细的分析和讨论。主要解决了EVC编程环境下实现串口通信功能、对GPS定位信息的提取和处理的问题。实验对wince5.0自定义平台下开发GPS接收装置给出了代码样例供参考,并已应用于智能阅读器项目中盲用定位模块。
嵌入式新闻 嵌入式资料 嵌入式培训 嵌入式linux 嵌入式系统 嵌入式开发 嵌入式 相关文章:
- 煤矿井下综合自动化系统中的应用(04-06)
- 软件Overlay:程序编写与调试(01-20)
- USB数据通信接□模块的程序设计(10-17)
- 东江产业园:力争2017年产值达千亿(09-30)
- 硅谷数模的SlimPort扩大了Nexus7的显示屏选择(08-01)
- Lonworks控制网络技术在城市排水泵站自动化中的应用(06-06)