基于PIC单片机步进电机自适应控制技术的应用研究
关键词:步进电机;PIC单片机;自适应控制技术;位置控制
中图分类号:TD679;TP273;TP368.1 文献标识码:A
Application Study of Adaptive Control of Stepping Motor Based on PIC MCU
HU Jun-da HU Hui HUANG Wang-jun
(Hunan Institute of Engineering,Xiangtan 411101, China)
Abstract:Stepping motor is used widely in industry and household field as driving executive unit.The paper studies the driving control of stepping motor used adaptive control,and builds the microcomputer control system used PIC16F877 MCU as kernel.At the same time the paper discusses analyses and compares the different control scheme to stepping motor.
Keywords:stepping motor;PIC MCU;adaptive control;position control
1、引言
步进电机是一种离散运动的装置,它和现代数字控制技术有着紧密的本质的联系。步进电机亦是一种将电脉冲转化为角位移或直线位移的执行机构,当步进电机驱动器接收到一个脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度(又称之为步进角),为此可以通过控制脉冲个数来控制角位移量,从而达到准确定位的目的;同时可以通过脉冲频率来控制步进电机的转动速度和加速度,从而达到调速的目的。从以上所述可知,步进电机是可以用脉冲信号直接进行定位控制,由于其具有一定的精度,且控制线路简单,使用方便、可靠;因此它广泛地应用于工业自动控制、数控机床、组合机床、机器人、计算机外围设备(扫描仪、磁盘驱动器、打印机)、照相机(包括光学照相机与数码照相机),投影仪、数码摄像机、放像机(VCD、DVD等)、大型望远镜、卫星天线定位系统、医疗器械、条码扫描仪以及各种可控机械工具等等。随着经济的发展,技术的进步和电子技术的发展,步进电机的应用领域更加广阔,同时也对步时电机的运行性能提出了更高的要求。本文就采用当前流行的PIC单片机来对步进电机进行控制以及自适应控制技术在步进电机中的应用进行了研究和讨论。
2、自适应控制原理
2.1系统原理框图
图1所示为模型参考自适应控制系统原理框图。从图中我们可以看出与典型的反馈控制系统的不同之处是在图1中增加了参考模型和自适应机构。在自适应控制系统中,当偏差信号e(t)=x(t)-y(t)进入自适应控制回路后,经运算产生准实时的调整作用,从而改变控制器的参数,使得x(t)-y(t)=e(t)趋向和直至等于零,此时自适应控制调整控制器参数过程完成。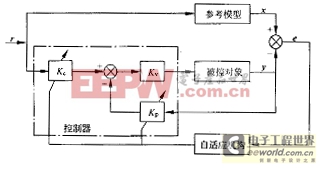
图1自适应控制系统原理框图
2.2 基于PIC单片机构成步进电机自适应控制
采用PIC单片机构成步进电机自适应控制系统如图2所示。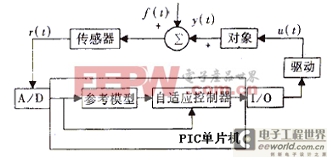
图2基于PIC单片机步进电机自适应控制系统组成框图
系统的参考模型、自适应控制器等算法及参数调整都由软件程序完成,模拟量r(t)等都需经过模数变换器A/D口送入单片微处理器中,而由微处理器产生的控制信号经I/O口经功率放大器去直接控制对象的驱动。在本文中所采用的PIC单片机为PIC16F877型。PIC16F877单片机为40引脚微处理器,其除了具有PIC系列单片机的共同特点外,还具有如下特点:(1)振荡频率达(DC)20MHz;(2)有4KB的FLASH程序存储器(14位);(3)128字节的E2PROM数据区;(4)192字节的数据存储器;(5)33条I/O线;(6)3个定时器;(7)8路10位A/D口通道;(8)2个PWM输出口。由于PIC16F877已在片中集成了这么多的外围设备,可使控制系统的硬件电路更为简单,并且大大提高了系统的可靠性,故此其特别适合用于步进电机的驱动控制。
基于PIC16F877的步进电机控制系统硬件结构图如图3所示。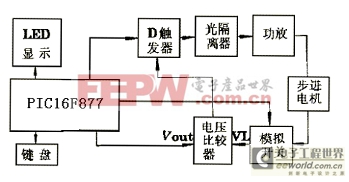
图3步进电机控制系统硬件结构图
本文所讨论的步进电机为应用于数控机床的5相混合式90BYG550A-0301型,其PIC步进电机驱动系统结构图如图4所示。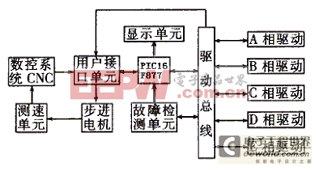
图4基于PIC步进电机驱动系统结构图
3、软件设计
3.1 步进电机的升降曲线
常见的步进电机升降速运行曲线有三种,即直线型、阶梯型、指数型,本文仅对直线型升降速曲线进行讨论,如图5所示。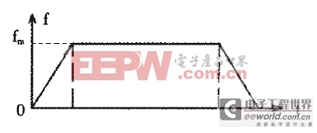
图5步进电机直线型升降曲线
这种直线型升降速运行曲线的升(降)速的加(减)速度是恒定的,在开环控制时,由于不可能充分考虑步进电机输出转矩随速度变化的特性,故此步进电机在高速时会发生失步,而本文所讨论的控制系统中,由于反馈与自适应技术的应用,这个缺点可以得以克服。
由步进电机的工作原理可知,步进电机的输出力矩随着它的旋转角速度变化,因此在整个升降速过程中,步进电机的角加速度应随转子角速度的变化而自适应地变化。使步进电机在不失步条件下,以最短的时间升速(降速)到给定速度,因此,寻求升降速曲线的自适应规律,是实现步进电机精确定位的关键。
3.2 软件构成
根据步进电机控制系统所要完成的功能,软件程序主要有:故障中断处理程序、定时移位中断程序、步进控制信号中断处理程序、相序刷新和通信处理程序、升降速曲线自适应控制处理程序。
以下主要介绍升降速曲线自适应控制处理程序。图6为升降速曲线自适应控制处理程序流程图。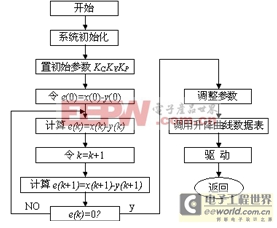
图6升降速曲线自适应控制处理程序流程图
单片机 51单片机 MCU 单片机视频教程 单片机开发 ARM单片机 AVR单片机 PIC单片机 Atmel stm32 单片机学习 相关文章:
- Windows CE 进程、线程和内存管理(11-09)
- RedHatLinux新手入门教程(5)(11-12)
- uClinux介绍(11-09)
- openwebmailV1.60安装教学(11-12)
- Linux嵌入式系统开发平台选型探讨(11-09)
- Windows CE 进程、线程和内存管理(二)(11-09)