武装机动平台测距避障系统设计
3.3 温度测量电路
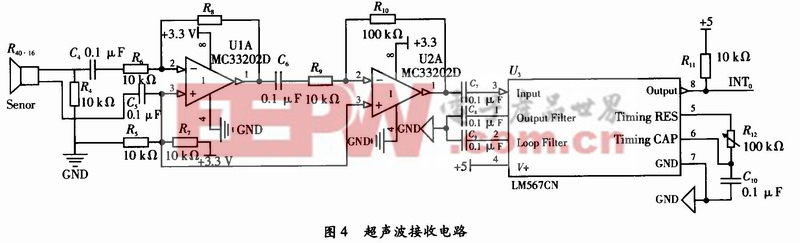
超声波在空气中传播时,大气压力、空气的温度、湿度等都影响其速度,其中空气的温度对超声波声速影响最大。为了得到更准确的超声波声速,本系统设计了温度检测部分对环境温度进行检测,以提高超声测距精度。测量环境温度时,直接以“一线总线”的数字方式传输,可以提高系统的抗干扰性。为此,本系统采用了DS18B20温度传感器检测环境温度,它具有结构简单、体积小、功耗小、抗干扰能力强、使用简单等优点。其温度测量范围为-55~125℃,测量分辨率为0.5℃,微处理器接口简单,输出为温度值的9位(二进制)数据读数。可方
便地实现超声波声速的温度补偿,从而提高测量的准确度。
4 测距避障系统软件设计
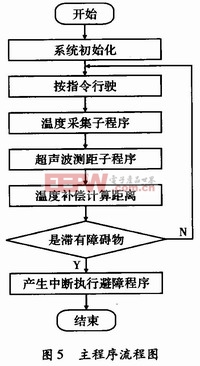
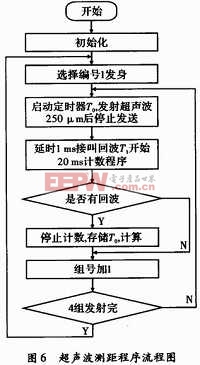
超声波测距系统的软件由主程序、超声测距子程序、温度数据采集子程序、显示子程序等组成。主程序和超声测距子程序的流程图分别如图5和图6所示。主程序首先在上电复位后,完成STC12C5412AD单片机及其外围功能模块的初始化。然后调用温度采集控制程序,读取当前温度值,并利用温度补偿程序,计算出当前温度下超声波的波速。接着依次启动4路超声波的发射,在超声波发射过程中,屏蔽接收电路向单片机输入信号。同时,使能定时器T1开始计时。超声波每次发射10个周期的信号,耗时为250μs。由于超声波在发射过程中会产生余波,同时
超声波发射传感器与接收传感器相距较近,所以发射时会有部分余波未经反射直接绕射到超声波接收传感器上,引起系统误差。为了避免误差,采用延迟接收的方法,在超声波发射完1ms后开放接收电路,并使能外部中断,调用延时程序,等待超声波回波,所以存在20 cm范围内盲区。若有回波,则引起中断,调用中断服务程序,读取T1计数值,经处理后,计算出距离,送LED显示,同时把计算距离送至避障子程序入口,产生相应的避障指令,控制机动平台的左转、右转、前进、倒退等动作。
文中把上述电路和算法应用于武装机动平台的测距避障系统,进行了多次超声波测距实验,实验结果如表1所示。

通过对实验中测得数据分析比较发现,当平台运动速率较低时,测量距离与实际距离间的误差较小,当平台运动速度增大时,测距误差有所增大,基本达到了系统所要求的精度范围。
5 结束语
本测距系统采用单片机作为主控芯片进行模块化设计,充分利用其硬件资源,设计较简单,软件编程易实现。在硬件电路设计时,设计了4路超声波收发传感器采集障碍物信息,同时加入温度补偿电路,提高测量精度。在编制系统软件时,考虑到超声波测距过程的“盲区”问题,在虚假反射波到来之前这段时间内禁止接收中断的发生,避开了虚假反射波带来的干扰。实验结果基本达到了系统所要求的精度范围,
在武装机动平台系统上得到应用。
- Windows CE 进程、线程和内存管理(11-09)
- RedHatLinux新手入门教程(5)(11-12)
- uClinux介绍(11-09)
- openwebmailV1.60安装教学(11-12)
- Linux嵌入式系统开发平台选型探讨(11-09)
- Windows CE 进程、线程和内存管理(二)(11-09)