惯性平台防倒台保护电路设计
惯性平台是运载火箭等航天飞行器制导与控制系统中的核心部件。其作用是为飞行器建立方位和姿态基准,同时测量飞行器相对惯性空间运动的角度、角速度、速度和加速度。惯性仪器的可靠性直接关系飞行器的可靠性。
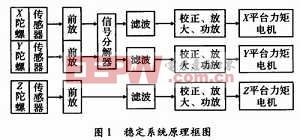
惯性平台是提供空间惯性坐标系基准,是通过平台稳定回路实现的。其由3条稳定回路组成平台稳定系统,系统原理如图1所示。以平台X轴为例,X轴受干扰力矩时,台体偏离X轴惯性基准。此时X陀螺敏感台体偏离角度,输出电信号,经前置放大器、变换放大器等电子线路,传递为直流信号输入到X轴平台力矩电机。力矩电机产生电磁力矩,抵消干扰力矩,使台体稳定在惯性空间。
外部环境过载或稳定回路的某一环节发生故障,都可使系统不稳定发散或开环,引起环架(常平架)伺服电机单向驱动的现象,当事故发生时,对有限姿态角惯性平台来说,平台环架会从原来(惯性空间)稳定位置向某一边快速转动倒下,直至碰到另一个环架的止挡销为止。对全姿态惯性平台来说,平台环架会从原来(惯性空间)稳定位置向某一边快速转动倒下,如果不及时切断系统电源,平台环架会连续不断地转下去。由于惯性平台上环架和陀螺具有的交耦性,在大速率情况下,一个环架伺服回路的快速倒环,会引起其它各环架伺服回路的同时倒环,这就是平台的倒台。它的结果,不但造成惯性平台上的陀螺、加速度计等仪表的损坏,而且会造成平台内部连接导线的损坏,是一种致命性的故障。
平台倒台在试验中也是不可避免的事件,除了平台力矩马达线圈开路或是其供电电源开路外,在平台伺服回路中任意点发生故障时,均会导致平台的倒台。为了避免倒台带来的损失,人们正在设法防止或减少倒台的发生,设计硬件防倒台保护电路无疑是一种可靠、有效的平台保护手段。
1 保护原理
平台姿态角测量系统通常是由粗、精双通道组成的测角系统。粗通道完成>1°的角度测量,精通道对1°以内的角度进行精测,测量精度可以达到角秒级,绝对角度由粗测值和精测值经适当组合得到,也就是粗、精耦合。设计平台防倒台保护电路,需实时测量平台姿态角。因为平台发生倒台时,平台的角速度较高,因此只需实时测量、计算粗通道的姿态角测量值即可。
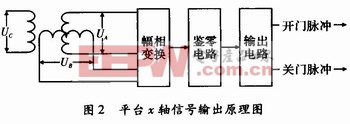
某型平台粗通道测角系统由一对极旋转变压器组成。采用转子单相激磁,定子两相输出,如图2所示。当特定频率的正弦电压UC加在转子绕组C上时,在定子绕组A、B分别产生感应电势EA和EB。在负载阻抗足够大时,可以认为绕组A、B的端电压UA和UB分别等于感应电势EA、EB,即UA=EA,UB=EB。于是有
式中,UM为UC的幅值;UAM为UA的幅值;UAM=KA·UM,UBM为UB的幅值;UBM=KB·UM;KA,KB为A、B两绕组的电压传输系数;θ为定子、转子绕组间相对机械角;φA、φB为A、B两相电压的初相角;ω1为2πf1,f1为激磁电源频率。
设旋转变压器为理想的,则有KA=KB=Ke1,于是
则UA和UB是两个幅值随转角θ做正弦和余弦变化的正弦波电压。UA和UB经幅相变换电路、鉴零电路后以及输出电路,最后输出为开关门脉冲信号。姿态角的大小是通过平台姿态角测量系统粗通道发出的开关门信号的时间间隔来判断的。保护电路需根据3个姿态角粗通道开关门信号的间隔,计算出角度和角速度,当角速度超过设定值时,则切断平台回路电源,使平台不飞转,保护平台仪表。
2 硬件设计
平台防倒台保护电路主要由角度测量电路和控制电路两部分组成。
2.1 角度测量电路
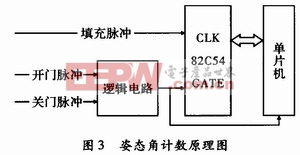
平台输出的开关门信号测量采用专用定时/计数芯片82C54进行测量。选用的Intersil公司的82C54是标准TTL电平的逻辑器件,当逻辑电平>2.2 V时认为是1,当逻辑电平0.8 V时认为是0。
这里以X通道的姿态角测量电路为例进行说明(如图3所示)。平台送出的X轴姿态角信号包括粗通道的两路开关门信号以及精通道的两路开关门信号。开门脉冲到来后,逻辑电路使82C54计数器的GATE端变为高电平,使82C54计数器开始计数,关门脉冲到来后,逻辑电路使82C54计数GATE端变为低电平,使82C54计数器停止计数,完成计数后CPU便可读取粗精通道的计数值,经过计算以及粗精通道的耦合即可精确也计算出姿态角的大小,进一步计算出角速度。根据平台倒台的判断依据(角速度通常达到较大角速度),平台保护电路只需测量粗通道的姿态角即可。
开关门计数需要解决的主要问题是如何使两路开关门脉冲信号控制82C54的GATE端,实现开门脉冲到来时82C54开始计数,关门脉冲到来时82C54停止计数。这里通过门电路实现,如图4所示。开关门信号经异或门后,再与开门信号相与,最后就得到即
- Windows CE 进程、线程和内存管理(11-09)
- RedHatLinux新手入门教程(5)(11-12)
- uClinux介绍(11-09)
- openwebmailV1.60安装教学(11-12)
- Linux嵌入式系统开发平台选型探讨(11-09)
- Windows CE 进程、线程和内存管理(二)(11-09)