基于单片机控制的连续式捣固车起拨道补偿设计
摘要:给出了一套基于单片机的多功能起拨道补偿控制系统的设计方法。该方法以步进式捣固车起拨道作业为基础,结合了四点法和三点法的检测原理与补偿原理,因而结构简单,操作方便,并可根据用户需求修改作业参数。实验证明,该系统抗干扰能力强,稳定性好,精度较高。
关键字:连续式捣固车;起拨道补偿;单片机
0 引言
我国养路机械的发展起步较晚。长期以来。我国捣固车电气控制技术都依靠国外进口。由于受制于国外的技术垄断,因而严重阻碍了我国养路机械的发展进程。为了走自主发展的道路,打破现有的国外垄断局面,摆脱国外技术的控制,实现电气控制系统的国产化,开发具有自主知识产权的电气控制系统,本文针对09-32型连续式捣固车起拨道的补偿控制技术进行了研究。
传统的起拨道补偿系统大多采用运算电路组成的模拟电路来完成,这种方式控制复杂,系统精度和稳定性都比较差。为此,本文介绍了一种基于单片机的多功能起拨道补偿控制系统,因篇幅原因,本文仅介绍拨道补偿的算法设计与实验。
1 拨道补偿算法设计
为了使09-32捣固车达到更高的效率并提高操作人员的舒适性,本设计采用连续作业的方式,其主要的作业装置装在一个可相对移动的卫星作业小车上。在作业的过程中,大车一直向前运动,作业小车则通过制动系统停下来作业。作业完成后再加速赶上大车。由于测量系统中的C点将随作业小车的位置不断变化而变化,C点的拨道正矢也随C点变化,因此,为了准确拨道,设计时就必须加一个补偿值。
1.1 四点法补偿算法设计
图1所示是四点法补偿算法的原理图。设卫星作业小车由C点移动距离x后到达点C’,C点正矢设为H1,C’的正矢设为*****,B点的正矢为H2,D点的方向偏移距离为FD。图1中的“1”表示正确的圆曲线位置; “2”表示有方向偏差的圆曲线;“3”表示整正后的圆曲线。
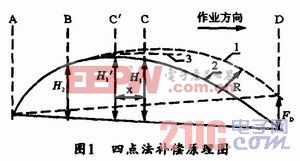
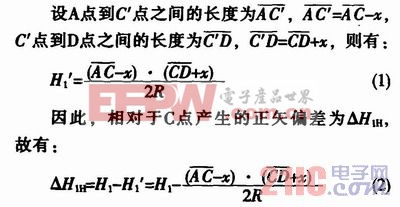
设由D点的方向偏移所产生的补偿值为△H1F,C点产生的偏移误差为FC,C’的偏移误差为 ,那么,根据相似三角形的比例关系可知
,那么,根据相似三角形的比例关系可知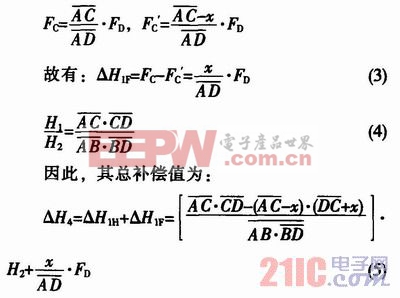
1.2 三点法补偿算法设计
三点法和四点法相比,其少了一个检测点A,其余的检测原理与补偿原理都相同,同理,就可推出系统的总补偿值为: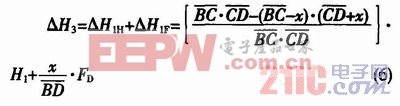
2 起拨道补偿控制系统
2.1 起拨道控制系统的系统构成
捣固车进行起拨道作业时,首先应进行线路各参数的检测,再结合沉降补偿、曲线修正、作业小车移动补偿等进行计算处理,从而得到正确的起道值和拨道值,最终控制起拨道装置对线路进行起拨道作业,其系统框图如图2所示。

2.2 起拨道补偿控制系统要求
由模拟控制系统可知,起拨道补偿控制系统主要包括模拟量输入输出、数字量输入以及外部中断信号。模拟量输入包括7路:即卫星小车位置、左前起道量、右前起道量、后摆超高差、作业点理论正矢、前端偏移、模拟地;模拟量输出有3路:包括左起道补偿值、右起道补偿值、拨道补偿值;此外有2路数字量输入,即左超高信号和卫星小车在后位信号。
对于系统的输入信号范围,由于其左右起道量的转换关系为50 mV/mm,故根据最大起道量可得出其输入电压范围为±7.5 V;而作业点的理论正矢传感器转换关系为25 mV/mm,故其输入电压范围为±3.75 V;卫星小车位置可根据卫星小车驱动控制板位移传感器得出,其输入电压范围为±10 V;此外,其前端偏移量转换关系为50mV/mm,输入电压范围为±7.5 V。
而对于系统的输出信号范围,可根据补偿算法反推,其输出信号范围为-3.1387~+1.046 V。
3 起拨道补偿系统的硬件设计
3.1 硬件电路结构
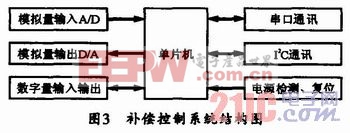
根据系统需求,本文设计的基于单片机的多功能起拨道补偿控制系统的系统结构如图3所示。该系统以单片机为控制核心,外加模拟量采样输入单元A/D、模拟量输出单元D/A、数字量输入单元8255A、I2C通讯单元、串口通讯单元以及其他外围电路构成。该系统具有可视化操作界面,可将不同车型的作业参数通过串口通讯的方式在显示器上显示出来,并可通过键盘修改作业参数,参数修改值可通过I2C通讯方式保存到一片EEPROM24C08存储器中,从而可保证前后作业参数的一致性。
3.2 电路器件说明
系统的单片机采用的是DALLAS公司生产的DS80C320,该单片机与8051单片机的引脚和指令集均兼容。因其采用CHMOS工艺,因而具有高速度、高密度、低功耗等特点。DS80C320具有256个字节的内部数据存储单元,其最大寻址能力为64 KB ROM和64 KB RAM,指令周期可由8031的12个机器周期缩短为4个,最高时钟频率为33 MHz,故可大大缩短指令周期,满足系统的高速要求,同时具有双数据指针,可利用双数据
指针进行数据的快速移动,这一点在菜单修改和显示时尤其重要,此外,DS80C320还具有可编程看门狗定时器和断电预警中断功能。
系统中的模拟量输入单元采用BURRBROWN公司的A/D转换芯片ADS7805和8通道多路选择开关组成,并通过程序控制来实现对各通道模拟量的采样与转换。ADS7805采用先进的CMOS结构,是一个完整的16位A/D转换器,其输入电压范围为±10 V,可满足系统输入电压范围的要求,ADS7803的采样频率为100 kHz,且转换精度高(ILSB=0.305 mV),其最大积分非线性度为±3LSB,可满足系统精度要求和信号范围的要求。
模拟量输出单元采用AD公司的D/A转换芯片AD7841,该芯片的基准电源为±5 V,具有14位并行数据输入,分辨率为14位,因而分辨率高(1LSB=1.22mV),并可输出8路模拟信号,输出电压范围为-10~10 V。
- 基于DSP的FFT算法在无功补偿控制器上的应用(09-27)
- 单片计算机系统抗干扰的软件途径(04-11)
- 基于TMS320LF2407A的低压动态无功补偿装置(06-15)
- CPLD在无功补偿控制仪键盘中的设计应用(06-05)
- 基于FPGA的2.45G RFID阅读器基带系统设计,硬件原理、框图(06-04)
- 西门子S7-200在电力无功补偿中的应用(12-20)