一种新颖的太阳能追踪采集系统设计
1.4 其他模块设计
无线数据接收端由微控制器模块、无线射频模块和串行通信模块3个模块组成;而无线数据发送及控制端包含所有11个模块;机械装置端主要由两个步进电机和硅太阳能电池板组成。
(1)微控制器模块:无线数据接收端采用AT89S52 8位单片机;无线数据发送及控制端选用MSP430F149 16位超低功耗单片机,其自带的ADC12模数转换器提供8通道12位A/D采样;
(2)电机控制模块:由L298双路全桥式驱动芯片控制2个四相八拍的步进电机,以带动太阳能电池板实现方位角、俯仰角两个自由度的角度调整;
(3)温度检测模块:采用Dalias公司生产DS18B20数字温度传感器测量外界温度;
(4)实时时钟模块:选用Dallas公司推出的一种高性能、低功耗的实时时钟芯片DS1302进行时间的计量;
(5)电源电路模块:电源电路模块有12 V,5 V和3.3 V三个部分,12 V供步进电机使用,5 V供AT89S52单片机使用,3.3 V供MSP430和其他芯片使用。系统用12 V直流电源供电,利用AMS117-5.0及AMS117-3.3稳压芯片把电源由12 V电压转换为5 V和3.3 V电压供各个功能模块使用;
(6)液晶显示模块:选用12864液晶模块显示光强、温度、时间等状态;
(7)串行通信模块:选用MAX232实现单片机和上位机之间的异步串口通信,传输数据;
(8)键盘控制模块:利用MSP430的P2端口中断实现键盘的操作,控制系统,调整时间。
2 软件设计
2.1 系统工作流程
由于所处地理位置不同(南北半球、海拔高度)和时间季节的不同,并且系统的机械装置是随意放置的,所以系统启动后硅太阳能电池板的初始基准角度是不正确的。系统上电开机后,首先系统会自动检测,调整基本的方向角和太阳能电池板的俯仰角,再进一步的微调使太阳光线垂直入射太阳能电池板,从而以此点作为基准点进入工作模式。第一次上电运行系统会要求输入时钟时间,然后系统就进入了正常工作模式。
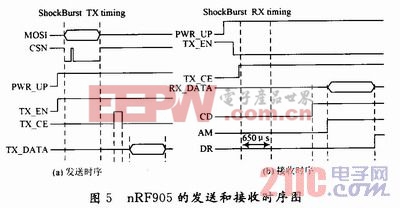
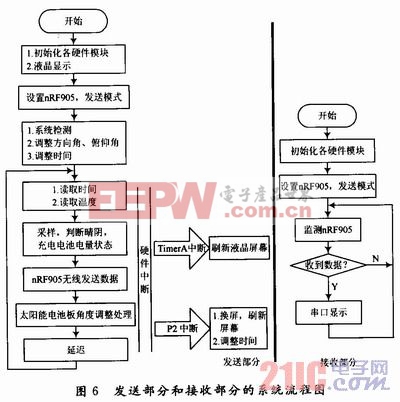
实时时钟开始正常运行,每隔1 s会对DS1302读取一次,作为太阳能电池板调整的时钟时间基准;系统用AD12模数转换器对采样通道进行采样、转换,判断天气的晴阴和充电电池的电量状态;同时会根据时钟时间和和光照强度对太阳能电池板角度进行调整,使太阳光线始终垂直入射太阳能电池板,以实现光伏发电的最大化;系统上电以后液晶显示模块利用TimerA定时器每秒10次地刷新屏幕,显示时间日期、天气温度、光照强度、充电状态等信息;而按键的动作是通过MSP430单片机P2端口下降沿的中断实现的,完成液晶屏幕的切换和时间的调整等;另外系统会通过无线射频装置发送数据到接收端,并上传到上位机,实现远程实时监控。图6是系统工作的流程图,分为发送和接收两部分流程。
2.2 太阳能电池板角度调整
系统综合光电追踪和视日运动轨迹两种追踪方式的优点,从外部时钟芯片中读取时间,根据时间和太阳角度的关系,每隔一段时间进行一次角度的调整,调整到预定的方位角和俯仰角(通常是稍大于准确角度);在运动过程中,AD12会记录各个位置的光强值,产生光照强度系列值,然后控制步进机再把太阳能电池板精确调整到光照强度最强的位置上。太阳能电池板角度调整的流程图如图7所示,当时间在MIN_TIME和MAX_TIME之间时,每隔一段时间MINUTE_PER_RUN进行一次角度调整,先是根据时钟时间调整到预定位置,再是根据光电检测强度精确调整到光照最强位置(时间上限、下限和每隔多少分钟检测一次太阳高度可软件设定,系统默认MIN_TIME=6,MAX_TIME=18,MINUTE_PER_RUN=15,即时间在6:00到18:00之间,每隔15 min调整一次)。
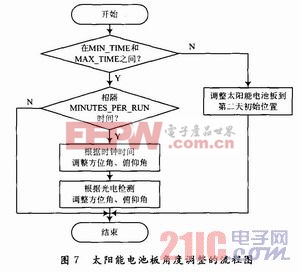
当时间不在MIN_TIME和MAX_TIME之间时,即时间已经到了晚上,系统要做的就是把机械装置调整到初始位置,也就是第二天的开始位置,然后系统就进入待机状态,机械装置不在运动,直至第二天的MIN_TIME以后。
3 实验
太阳能追踪采集系统的设计实物模型如图8所示,分别为无线数据接收端、无线数据发送及控制端和机械装置端。

经过实际测试,系统能够正确驱动机械装置,能在MIN_TIME到MAX_TIME范围内,而且每隔一段时间MINUTE_PER_RUN太阳能电池板调整一次,实现了对太阳进行精确、快速追踪;太阳能电池板工作正常,可以有效地为锂电池充电;实现了液晶显示和复杂的键盘动作相协调,可以图形化观测电池电量,为系统设置时钟时间;光电检测、温度、实时时钟、无线射频等模块能够正常运行,通过无线传输数据,单片机和上位机的串口通信,能够远程监控。系统达到且超出了预期目标,满足设计要求,能够稳定可靠的运行,实现了太阳能的自动追踪采集控制。
4 结语
太阳能追踪采集系统利用步进电机双轴驱动,通过对机械装置端进行水平、俯仰两个自由度的控制,先是根据时钟时间调整太阳能电池板到预定位置,再是根据光电检测精确调整到光照最强处,能实现对太阳的全天候追踪及精确、快速定位,使追踪太阳更加稳定可靠。通过液晶显示和无线射频传输,既可现场监控又可远程监控太阳光照强度、天气温度、充电池电量状态和时钟时间等信息。通过键盘的动作则能完成液晶屏幕的切换、时间的调整以及图形化显示,而且将以太阳能电池板充电的锂电池作为实时时钟DS1302的备用电池,可在系统断电的情况下使实时时钟依然正常工作,从而保持准确的时钟时间。如果研究并设计电源管理模块,把系统的外部供电电源、给太阳能充电的电源、电机使用的电源和其他芯片使用的电源统一整合,分别管理,就可以实现系统的太阳能自供电。
- Linux嵌入式系统开发平台选型探讨(11-09)
- VxWorks实时操作系统下MPC8260ATM驱动的实现(11-11)
- VXWORKS内核分析(11-11)
- Linux内核解读入门(11-09)
- linux文件系统基础(02-09)
- 基于Winodws CE的嵌入式网络监控系统的设计与实现(03-05)