磁导航智能车路径信息采集系统的设计与实现
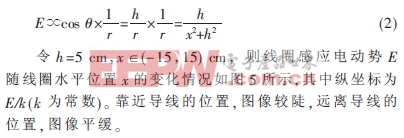
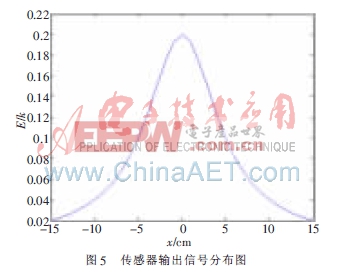
3 路径信息采集系统的软件设计 根据安培环路定理,距导线r处的磁感应强度反比于距离r。而线圈的轴线是水平的,感应电动势反映了磁场的水平分量,因此感应电动势: 路径信息的采集首先要确保传感器输出信号的准确性,准确性的确保应从相同条件下各个传感器输出信号的数值差异和信号数值分布两个方面来判断。本文在软件上主要采用归一化算法和曲线拟合算法来确保路径信息采集的准确性。 小车运行过程中,使用基于NRF24L01的无线模块和基于LabVIEW的上位机对设计方案进行在线调试。首先根据归一化算法,测得各传感器输出信号的最大值,即各传感器放置在导线正上方一定高度时的输出量作为基准量,各传感器的输出信号除以基准量作为归一化后的数据进行曲线拟合。为方便运算,本文将归一化后的数据乘以126作为最终数据。表2为赛车运行到某一弯道处时,各传感器输出量与归一化后的数据量之间的关系,同时设定各个传感器的横坐标。通过上位机观测到的各传感器输出量如图6所示,各传感器输出量归一化后的数据量如图7所示。利用最小二乘法求得峰值点坐标值为1.516(保留小数点后三位小数)。 未处理之前,各传感器分布并无一定规律,而归一化处理后,各传感器数据按一定规律分布。曲线拟合算法可以准确提取出峰值点横坐标,这样智能车方向闭环控制中的位置反馈由一系列离散量变成连续量,反馈信息更加精确。 本文介绍了磁导航智能车路径信息采集系统的设计方案,从硬件和软件的角度对设计过程进行了较为详细的阐述。硬件上,采用仪表用差动放大电路对采集到的较弱的信号进行精确放大处理,采用加速度传感器对车体姿态做出判断;软件上,采用归一化算法和曲线拟合算法对传感器采集到的信号进行进一步处理,从而提取出车体当前的准确位置。测试结果证明,本方案是可行有效的。但该设计方案还有一些可以改进之处,例如在对传感器布局时,可以将电感线圈按照两两垂直的方向排列,这样可以分别求得某一点处三个方向上的磁场分量;在软件的算法上也可以引入对赛道类型的预判策略。这些都是进一步研究的方向。
本设计将7个传感器水平并排放置,距地面高度约为5 cm。假设线圈在水平方向上与导线距离为r,线圈高度为h,如图4所示。 
3.1 归一化算法
该算法是将所有传感器输出信号变换为无量纲的量,屏蔽各传感器在硬件和物理特性上的差异。具体算法流程是:首先测量每个传感器输出信号的最大值(Max1、Max2、Max3、Max4、Max5、Max6、Max7)作为基准量,在赛车运行过程中,将7个传感器采集到的数据分别除以7个基准量,即可得到传感器归一化后的数值,该数值可用于赛道类型判断。
3.2 曲线拟合算法
从控制的需要,只需提取出导线所处的位置,也就是图像中峰值点的横坐标。因此只要拟合出一条曲线,使该曲线峰值点横坐标尽可能地逼近导线所处位置的横坐标即可。本文采用最小二乘法进行曲线拟合。
取7组数据中最大的前5组数据进行二次曲线拟合,得到二次曲线方程为: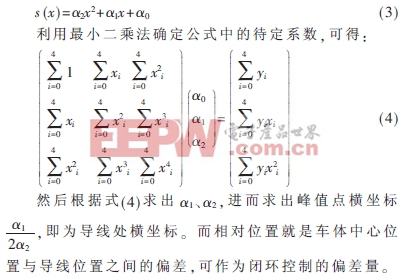
采用最小二乘法对数据进行二次曲线拟合有如下优点:
(1)可以满足智能车控制的实时性需要。进行二次曲线拟合的计算量相比于其他曲线拟合方法较小,同时二次曲线拟合的公式可以事先求得,大大减少了运算量。
(2)对导线位置判断较为准确。虽然传感器信号的实际分布情况不是二次函数的形式,但是通过二次曲线拟合后得到的峰值点横坐标与实际峰值点横坐标接近。因此通过该算法可准确地提取出导线的位置。
4 路径信息采集系统的测试结果与分析
本文采用如图4所示的7个传感器一字型排列的方案,测试过程中同时对2个传感器和13个传感器一字排布的方案进行了测试,并对三种排布方案进行了优缺点的分析,其结果如表1所示。综合考虑后,选用7个传感器的方案最合适。[next]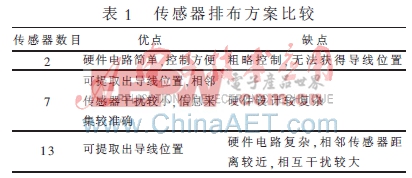

对于车体姿态的检测,车体在水平位置、上坡和下坡时加速度传感器输出信号分别如图8、图9、图10所示。根据本文中加速度传感器的放置位置,车体的前后倾斜程度影响传感器X方向的输出量,因此检测加速度传感器X方向上的输出量变化即可判断车体当前倾斜程度,进而改变控制策略。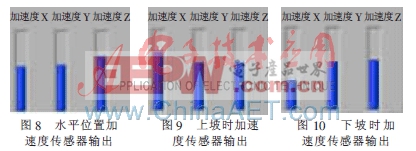
嵌入式新闻 嵌入式资料 嵌入式培训 嵌入式linux 嵌入式系统 嵌入式开发 嵌入式 相关文章:
- 煤矿井下综合自动化系统中的应用(04-06)
- 软件Overlay:程序编写与调试(01-20)
- USB数据通信接□模块的程序设计(10-17)
- 东江产业园:力争2017年产值达千亿(09-30)
- 硅谷数模的SlimPort扩大了Nexus7的显示屏选择(08-01)
- Lonworks控制网络技术在城市排水泵站自动化中的应用(06-06)