多设备接口波特率不匹配的研究
不同设备接口在传输数据时所要求的频率往往不同,而在一些仅使用一个晶振的系统上,如果一个接口的频率完全匹配,那么其他接口所使用的频率往往就不完全符合要求。例如,为了实现USB总线的48 MHz的传输频率,一般可以用12 MHz的晶振来倍频得到,而12 MHz的晶振在进行串口通信时由于与标准波特率不成倍数关系,因而期望波特率和实际波特率往往不同。
在波特率较低时,这种误差影响不大。例如,期望波特率为57 600 bps时,实际波特率为57 692 bps,传输正常;而当期望波特率高达115 200 bps时,则实际波特率为125 000 bps,误差较大。实验结果表明,此时如不对其进行修正,则无法进行正确传输。
笔者通过实验研究证明,通过使用小数波特率发生器,完全可以像低波特率时一样正确地传输,实现了多位小数的分数逼近法的算法,避免了人工计算过程,彻底实现了波特率计算和修正的自动化。
1 小数波特率发生器工作原理
当外部晶振或者VPB时钟值不是标准波特率的整数倍时,波特率的设定往往会出现偏差。通过小数波特率发生器则可减小或者消除这种偏差。
下面以LPC214x处理器的串口UART1为例阐述小数波特率发生器的工作原理。要使用小数波特率发生器,需要设置小数分频寄存器(U1FDR),该寄存器控制产生波特率的时钟分频器。
预分频器接收VPB时钟,并经过指定的小数要求产生一个输出时钟,小数由该寄存器的值决定。
在不使用小数波特率发生器时,UART1波特率由下式计算:
UART1baudrate = PCLK/(16×(256×U1DLM+U1DLL))
当使用小数波特率发生器时,则由下式计算:
UART1baudrate = [PCLK/(16 ×(256 × U1DLM + U1DLL))] ×(MulVal / (MulVal + DivAddVal)
其中PCLK为VPB总线时钟,U1DLM和U1DLL为标准的UART1波特率除数寄存器。可以看出,MulVal / (MulVal + DivAddVal)就是用来修正波特率的小数值,被称作校准系数。它由两个参数构成:DivAddVal(波特率生成欲分频除数值)和MulVal(波特率预分频乘数值)。DivAddVal和MulVal都必须为整数,且满足:
1 ≤ MulVal≤ 15,0 ≤ DivAddVal ≤ 15。
根据以上公式很容易计算串口波特率,但是实际应用中,更多的是在使用非标准晶振时确定波特率校准系数,即设定U1FDR寄存器DivAddVal和MulVal的值。确定波特率校准系数可以分如下3步进行:
① 确定除数锁存器的值: 根据需要的波特率bps,按照没有校准系数的波特率计算公式确定除数锁存器的值(DLM,DLL)。由于采用非标准晶振,得到的结果通常为小数。无论小数值大小,均舍弃小数部分的值,对结果进行取整操作(不是四舍五入),得到除数锁存器的值。
② 确定校准前的波特率: 将①得到的除数值(DLM,DLL)代入不带校准系数的串口波特率计算公式,得到未经过校准的波特率BPS。
③ 确定校准系数p: p=bps/BPS=MulVal/(MulVal+DivAddVal)
根据限制条件1≤MulVal≤15和0≤DivAddVal≤15,寻找合适的值,使得到误差尽可能小的校准系数。
2 多位小数的分数逼近算法
(1) 传统获取MulVal和DivAddVal整数值的方法
假设系统晶振为12 MHz,拟设定波特率bps为115 200 bps,根据前面所述校准系数的确定过程,12 000 000/(16×115 200)=6.51,取6为除数值,那么BPS=12 000 000/[16×(256×0+6)]=125 000 bps,所以p=bps/BPS=0.921 6。
传统获取MulVal和DivAddVal整数值的方法大多依靠经验技巧或者反复试验。如参考文献2《深入浅出ARM7LPC214x下》中,第77页描述的那样:
根据1 ≤ MulVal ≤ 15和0 ≤ DivAddVal ≤ 15的限制,由于系数接近1,因而DivAddVal取尽可能小的整数。多次试验取值得到12 / (1 + 12) = 0.9231与期望的系数0.9216最接近,能够使波特率误差最小,因而最后确定MulVal = 12, DivAddVal = 1。
显然,按照这种方法是无法完成程序自动化的,必须在每次编程之前根据波特率来人工推算出MulVal和DivAddVal的值,并且还需要大量的误差对比和反复试验,导致工作效率的降低。
(2) 获取MulVal和DivAddVal整数值的新方法
我们的问题在于寻找一个分数,它能够尽可能地接近校准系数。那么可以使用这样一种多位小数的分数逼近法,该算法认为:任何一个多位小数,无论是无理数还是有理数,均可以用一个分数来近似表示它,并可用一定的程序使其误差越来越小,直至达到所需的精确度。
根据该算法,可以通过程序来实现获取这两个参数的自动计算,该程序流程如图1所示。
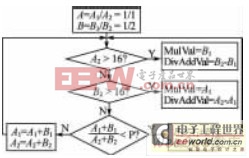
图1 程序流程
初始化时要求找到A和B的值,使其满足B
利用1 ≤ MulVal ≤ 15和0 ≤ DivAddVal ≤ 15的限制作为迭代退出条件,当A
嵌入式新闻 嵌入式资料 嵌入式培训 嵌入式linux 嵌入式系统 嵌入式开发 嵌入式 相关文章:
- 煤矿井下综合自动化系统中的应用(04-06)
- 软件Overlay:程序编写与调试(01-20)
- USB数据通信接□模块的程序设计(10-17)
- 东江产业园:力争2017年产值达千亿(09-30)
- 硅谷数模的SlimPort扩大了Nexus7的显示屏选择(08-01)
- Lonworks控制网络技术在城市排水泵站自动化中的应用(06-06)