主动前轮转向控制技术的现状与发展趋势
扰动对车辆姿态的影响常常很突然,车辆姿态的控制对驾驶员而言,特别是对新手来说,就比较困难。而这样的控制由控制器却完全可以实现。由于涉及到车辆的姿态控制的动力学参数主要是横摆角速度,因而对横摆角速度的控制也成为主动前轮转向控制最重要的方面。 对横摆角速度的控制,常见的方法有3种:(1)横摆角速度反馈控制;(2)鲁棒单向解耦横摆角速度控制;(3)基于扰动观察器的横摆角速度控制。横摆角速度反馈控制的基本思路是利用理想横摆角速度Yest和实际横摆角速度Y之差进行反馈控制。宝马的主动转向系统运用的是横摆角速度反馈控制的方法,其控制器为PI控制。横摆角速度反馈控制不但使横摆角速度响应的带宽增大,而且使横摆角速度阻尼增大,尤其是在车速较高时改善了车辆的操纵稳定性。但也同时存在着降低横摆角速度和侧向加速度的增益,进而使驾驶员中低速时操纵困难。针对上述问题,一般采用定增益形式的横摆角速度反馈控制进行改进,该控制方法可保持车辆横摆角速度增益在反馈控制时不变。图3所示为一定增益横摆角速度反馈控制框图。其中,为车辆在等速圆周运动情况下从前轮转角到横摆角速度的增益,Kyaw为反馈比例系数。 2.2 D*控制 D*控制(或称为横摆角速度和侧向加速度的综合控制)源于四轮转向控制中对后轮转向的控制策略,是一种对车辆的横摆角速度和侧向加速度进行综合控制的方法。在该控制中,控制的反馈量不再只有横摆角速度,而是横摆角速度与侧向加速度的线性组合,如式(3)所示。 式中:Cy为侧向加速度,VY为车速与横摆角速度的乘积,两者量纲一致,从这里可以看出,D*控制是一种侧重于侧向运动控制的控制方法。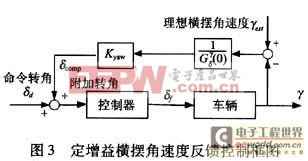
鲁棒单向解耦横摆角速度控制是由德国宇航局的阿克曼教授提出的,在合理分解驾驶员操作任务的基础上,对横摆角速度和侧向加速度单向解耦,进而对横摆角速度进行控制。所谓单向解耦,指的是控制器在对车辆的横摆角速度进行反馈控制时对车辆前桥解耦点的侧向加速度没有影响,而在驾驶员进行侧向运动控制时,可以通过侧向加速度间接影响横摆角速度,保证车辆能顺利过弯,这是该算法的最大特点。由于该算法本身对车辆不确定参数(如:车辆质量分布、车速、轮胎与地面间的附着系数)具有一定的鲁棒性,故而称为鲁棒单向解耦控制。鲁棒单向解耦控制也存在横摆角速度阻尼随车速的增加而下降的问题,可采用预设横摆角速度阻尼的控制方法加以解决。该方法是在单向解耦控制和横摆角速度阻尼之间进行折衷,实现既能在不同车速下保持较好的横摆角速度阻尼特性,又能维持车辆控制对名义模型的横摆角速度单向解耦。图4所示为鲁棒单向解耦横摆角速度控制框图。图中在实际控制时采用的是一个衰退的积分,从而使横摆角速度的控制只在扰动发生1 s内产生作用,帮助驾驶员稳定车辆,1 s以后,车辆将完全在驾驶员的控制之下。参考横摆角速度值由式(1)算出,是一个与速度有关的稳态值。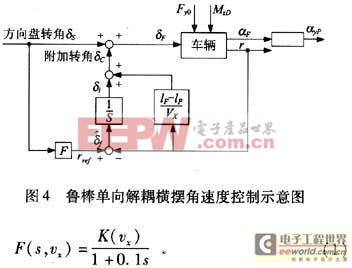
近年来,随着控制技术的发展,一种以往多用于电机控制的扰动观察器控制方法被移植到了车辆横摆角速度控制中。该控制方法的基本原理如图5所示,利用扰动观察器理论建立的反馈补偿器,通过反馈补偿器根据车辆包含扰动的实际横摆角速度生成一个补偿转角,叠加到车辆的输入转角上,从而实现对车辆横摆角速度的控制。反馈补偿器的表达式如下: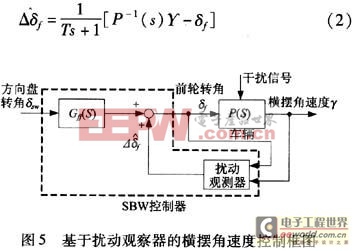
从表达式中可以看出,所谓的扰动观察器其实质是利用车辆的反向动力学传递模型,通过车辆的实际横摆角速度来计算车辆的名义前轮转角,进而通过与实际前轮转角求差来得到抵消横摆扰动的转角来进行控制。由于控制过程中横摆角速度信号会遇到噪声信号,故一般扰动观察器都带有一个低通滤波环节。低通滤波环节同时还有改变反向动力学模型分子分母阶次的作用,使其在控制上可以实现。基于扰动观察器的横摆角速度控制具有结构简单,含义清晰,对外界扰动和系统参数变化具有较强的鲁棒性特点。理论和实验证明扰动观察器的控制结构更适合进行横摆稳定性控制,成为未来横摆角速度控制发展的一个方向。
- 基于μC/OS-Ⅱ的Flexray线控转向系统的实现(08-21)
- Windows CE 进程、线程和内存管理(11-09)
- RedHatLinux新手入门教程(5)(11-12)
- uClinux介绍(11-09)
- openwebmailV1.60安装教学(11-12)
- Linux嵌入式系统开发平台选型探讨(11-09)