基于MSP430单片机的便携式PID参数整定仪的实现
时间:05-19
来源:互联网
点击:

上面模块还要进行详细划分,每个模块之间的耦合很少,这样就可以独立编程、调试,提高了软件开发的模块性。
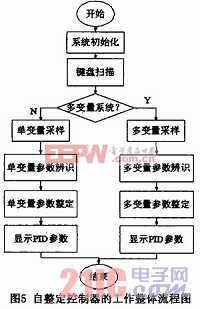
4.2 PID参数整定仪的总体工作流程
图5是自整定控制器的工作流程图,用户输入设定值,然后对过程的输入量u和输出量y进行采样。对采样的数据进行处理,并计算出最佳的PID参数整定值。整定具体过程如下:
(1)通过控制面板设定采样时间及设定值以进行采样。
(2)将采集的数据处理后得到辨识所需要的10~20个点。
(3)运用基于频域的模型辨识算法对系统进行辨识,得到系统的模型。
(4)根据模型采用相应的辨识算法计算PID参数值。
(5)在LCD上显示新的PID参数。
介绍了本参数整定仪的各功能模块,并且进行了硬件及软件设计。此整定仪集单变量和双变量整定功能于一身,适合于任何使用PID控制器的场合,不过只有在过程获得平衡状态时辨识方法才可使用。此整定仪整定出的PID参数在LCD上显示。工作人员只需将整定出的新参数在系统中进行设置。此过程简单实用,方便工作人员操作,并且由于设计小巧,便于工作人员随身携带。
参数 定仪 实现 PID 便携式 MSP430 单片机 基于 相关文章:
- 基于虚拟仪器的特性测试参数数据库的设计(06-24)
- MSP430在电力测控保护产品中的应用(01-15)
- 基于MSP430的便携式运动量及生理参数监测仪设计(02-04)
- DSP芯片在水下目标检测与参数估计中的应用 (07-08)
- 基于DSP的水下目标检测与参数估计应用(01-27)
- 基于DSP的小型气象站的硬件设计(07-20)