基于CAN 总线的电动机保护器的研究
者提取某次谐波分量(例如二次谐波、三次谐波)非常方便。当采样频率为300hz 时,傅立叶算法的计算也很方便,用汇编语言编程也容易实现。另外,全波傅立叶算法所用的数据窗为一个周期;如果要提高微机保护的动作速度,也可以采用半波傅立叶算法。
主程序主要是用来实现通信协议中的各项功能。微处理器通过外部中断来响应CAN 总线通信。键盘显示扫描的周期为1ms.并在主程序循环中不断的查询各类标志,如查询到某个标志置位则转入相应的程序处理。主程序流程图如图2 所示:

将CAN 总线技术引入到电动机的保护中,就是为了让其组成网络,实现主监控单元对各个分散的保护单元的在线实时监控,因此保护节点通信设计就关系到整个保护系统的可靠性和实用性。通信程序由三部分组成,分别是CAN 节点初始化程序,报文接收程序,报文发送程序。
SJA1000 的初始化只有在复位模式下才能进行,初始化主要包括工作方式的设置、接受滤波方式的设置、接受屏蔽寄存器和接受代码寄存器的设置、波特率参数的设置和中断允许寄存器的设置等等。在完成SJA1000 的初始化设置后,SJA1000 就可以回到工作状态,进行通信任务。初始化流程图如上图3 所示。
发送子程序负责节点报文的发送。发送时只需要将待发送的数据按待定格式组合成一帧报文,送入SJA1000 发送缓存区中,并置位命令寄存器中的发送请求位标志,然后启动SJA1000 发送即可。发送子程序报文发送分数据帧和远程帧两种。远程帧无数据场。报文发送有两种模式,即中断和查询。考虑到通信实时性的要求,本文采用中断模式。发送子程序流程图如图4 所示。
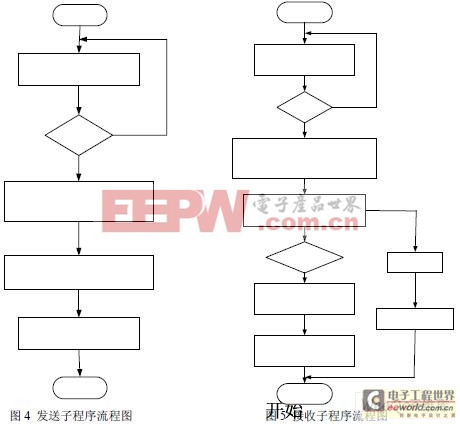
接收子程序负责节点报文的接收,并且要对诸如总线关闭、错误报警、接收溢出等情况进行处理。和发送子程序一样,也有中断和查询两种方式,本文采用中断方式。接收子程序流程图如图5 所示。
6 创新点及结束语
本文提出将 CAN 总线技术应用到电动机保护中,使其组成网络,实现了智能保护各节点之间、节点与上位机之间的通讯。本设计对于电动机的各种故障有良好的保护效果,在实验室环境下仿真结果良好,在某钢铁厂生产车间的实际应用中也取得了令人满意的效果,达到预期目标。
- WindowsCE.Net下CAN卡的驱动程序设计(04-12)
- 对TTCAN的分析(05-26)
- 嵌入式Win CE中CAN总线控制器的驱动设计与实现(05-01)
- μC/OS-II的多任务信息流与CAN总线驱动(07-11)
- 采用CAN总线实现DSP芯片程序的受控加载(11-08)
- 基于DSP的电动汽车CAN总线通讯技术设计(10-08)