基于单片机改造迈氏干涉仪自动测量微小长度
摘要:为了能精确地自动测量He-Ne激光波长和透明薄膜厚度,采用单片机驱动步进电机带动迈克尔干涉仪的微调手轮转动,使光屏上产生稳定变化的干涉条纹,用光电二极管检测条纹信号光强变化,通过光电转换电路将光信号转变为电信号,输入到单片机进行处理,测量结果自动显示在液晶屏上。在一般实验环境下进行了多次实验,将实验结果与标准值进行比较得出,改造后的仪器测量微小长度速度快,误差小,精确度高。
关键词:单片机;步进电机;迈克尔逊干涉仪;微小长度测量;薄膜厚度测量
0 引言
薄膜厚度是薄膜性能参数的重要指标,如何准确、快速、方便地测量膜厚在实验中具有十分重要的意义。迈克尔逊干涉仪测量激光波长是大学物理实验中重要的一部分,实验时实验者手动调节微调手轮,人眼观察干涉条纹,带来很多人为误差,影响测量结果。为了保护实验者视力,提高测量精度,扩大测量范围,同时促进光学教学实验仪器的发展,在研究单片机的基础上,对迈克尔逊干涉仪进行了探索和改造。
改造后的迈克尔逊干涉仪在不改变物理学基本原理的基础上,增加了电子技术中的大量元素,使物理学和电子技术很好地结合起来,实现了对激光波长和薄膜厚度的自动测量。测量简便、精确度高,有一定的实用性。
1 系统工作原理
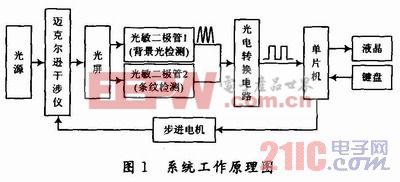
基于单片机改造的迈克尔干涉仪进行微小长度的自动测量,测量对象为激光波长和薄膜厚度,系统工作原理如图1所示。
1.1 激光波长测量
使用He-Ne激光作光源,利用光的分振幅干涉法。用步进电机带动微调手轮转动代替手动调节,电机旋转角度对应光程差为2△d;光屏上得到的“吞”、“吐”条纹,通过光电转换电路转换为脉冲信号,输入到单片机进行计数(条纹数N),代替了人眼观察条纹计数;测量步骤、结果(波长λ=2△d/N)及相对误差通过液晶屏显示,从而实现波长自动测量。
1.2 薄膜厚度测量
使用白光作光源,利用等厚干涉法。光路原理图如图2所示,当白光光程差为零时发生干涉现象,将光屏上的彩色条纹通过光电转换电路转换为脉冲信号,同时记录M1的初位置d1;放入薄膜后,光程差增大,彩色条纹消失;电机带动M1移动到彩纹再现,记录M1的末位置d2。用阿贝折射仪测出薄膜折射率n,输入到单片机,根据公式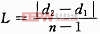 进行处理,即可得到薄膜厚度。
进行处理,即可得到薄膜厚度。
 2 系统结构及硬件电路设计
2 系统结构及硬件电路设计
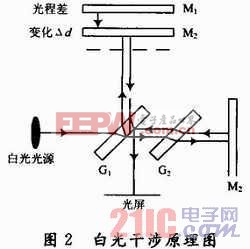
系统结构主要是在原有物理光学仪器——迈克尔干涉仪的基础上增加了电子技术的设计模块,如图3所示。模块包括:单片机系统、键盘控制单元、电机驱动电路、光电转换电路和液晶显示单元。
2.1 光电转换电路设计
光电转换电路由两部分组成,如图4所示,氦氖激光干涉条纹检测和白光干涉彩纹检测,它的作用是把变化的光信号转换为可供单片机识别的脉冲信号。
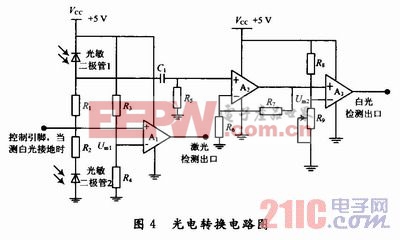
2.1.1 激光干涉条纹检测
该部分由两个光敏二极管,偏置电阻R1,R2,分压电阻R3,R4和一个运算放大器A1组成。当微调旋钮转动时,光屏上会出现圆环型“吞”、“吐”条纹,一个光敏二极管对准圆环条纹正中心,另一个用于检测背景光,这样设计可以大大减小外界光强的影响,在一般光强下均可测量。光敏二极管对变化的光信号敏感,加上偏置电阻R1和R2后会输出合适的电信号。分压电阻R3,R4给运算放大器的反向输入端提供合适的门限电压,电信号从同向输入端输入,当高于反向输入端的门限电压Um1时,输出电压翻转到电源电压的正极(+5 V),当输入电压低于反向端的门限电压Um1时,输出电压翻转到电源电压的地(0 V)。由此,“吞”、“吐”条纹转换为了脉冲信号。
2.1.2 白光干涉彩纹检测
该部分由光敏二极管1,偏置电阻R1,放大器A2和门限比较器A3组成。它的原理与激光类似,当彩纹出现时,光强度变化会使光敏二极管1产生微弱的电信号,此信号经过放大器A2被放大(放大器的放大倍数由电阻R6和R7决定),再经过门限比较器A3(门限比较器的门限值由电阻R8和R9确定),最后转变为了脉冲信号。
2.2 步进电机驱动电路设计
步进电机是一种将电脉冲转化为角位移的开环控制元件,它的转速、停止的位置只取决于脉冲信号的频率。采用步进电机带动迈克尔干涉仪的微调旋钮转动,避免了很多人为因素对测量的干扰。本作品选用28BYJ-48型步进电机,它的步进值小,提高了测量的精确度。
步进电机一经选定,其性能取决于电机的驱动电压。步进电机转速越高,力矩越大则要求电机的电流越大,驱动电源的电压越高。单片机I/O口流出的电流太小不能驱动电机转动,需要外接驱动芯片增大电流。选用高压大电流达林顿晶体管阵列ULN2003驱动28BYJ-48型步进电机,其工作原理如下:当输入端为高电平时,ULN2003输出端为低电平;当输入端为低电平时,ULN2003输出端为高电平。驱动电路如图5所示。
测量 微小 长度 自动 干涉仪 单片机 改造 基于 相关文章:
- 基于DSP的光纤高温测量仪的软件设计 (04-08)
- 基于DSP处理器的光纤高温测量仪的设计方案(05-08)
- 用DSP实现抖动(Jitter)测量的方法(04-28)
- 基于dsPIC30F2010的土壤水分测量仪的设计研究(08-27)
- 用DSP实现增量式光电编码器的细分(01-01)
- MSP430在电力测控保护产品中的应用(01-15)