PC机与多MCS-51单片机间的串行通信设计
在测控系统和工程应用中,常遇到多项任务需同时执行的情况,因而主从式多机分布式系统成为现代工业广泛应用的模式。它们大多由IBM-PC微机和MCS-51单片机组成。单片机功能强、体积小、价格低廉、开发应用方便,尤其具有全双工串行通讯的特点,在工业控制、数据采集、智能仪器仪表、家用电器方面都有广泛的应用。同时,IBM-PC机正好补充单片机人机对话和外围设备薄弱的缺陷。各单片机独立完成数据采集处理和控制任务,同时通过通信接口将数据传给PC机,PC机将这些数据进行处理、显示或打印,把各种控制命令传给单片机,以实现集中管理和最优控制。
故IBM-PC机(上位机)与各MCS-51单片机(下位机)之间的通信显得尤其重要。本文主要探讨它们之间的远距离串行通信接口和软件程序设计。
2 硬件设计接口
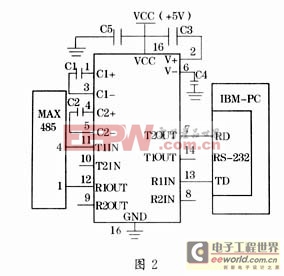
RS-232-C串行通信接口是美国电气工业协会(EIA)与BELL公司等一起开发的一种标准通信协议,现在它在终端、外设与计算机中被广泛采用。该标准规定了21个信号和25个引脚,但在智能仪器与计算机之间的通信中常用2个信号及3个引脚(2脚数据输入,3脚数据输出,7脚信号地)。它采用双极性的负逻辑信号,0逻辑信号为+3V至12V,1逻辑信号为-3V至-12V,它的传输速率最大为20kbit/s,传输距离仅为15m。由于RS-232主要是完成电平移位、转换和信号反相等,所以它有自己的电平转换与驱动芯片,如MC1488(发送)与MC1489(接受)。IBM-PC机有两个标准的RS-232串行口,其电平采用的是EIA电平,而MCS-51单片机的串行通信是由TXD(发送数据)和RXD(接收数据)来进行全双工通信的,它们的电平是TTL电平,为了PC机与MCS-51机之间能可靠地进行串行通信,需要用电平转换芯片。由于MC1488和MC1489需要±12V、+5V电源供电,故采用MAXIM公司生产的低功耗、单电源的MAX232芯片,因为它自身带有电源电压变换器,可以把+5V电源变换成RS-232输出电平所需的±10V电压,能实现RS-232的技术指标,并只需要+5V的电源,为串行通信带来了较好的性能和低廉的价格。MAX232的接口电路图如图2所示。
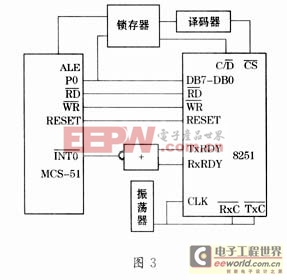
PC机采用可编程串行异步通信控制器8251A来实现,通过对INS8251A初始化可以控制串行数据传送格式和速度及其工作方式,使得它与单片机的通信方式一致,从而实现PC机与单片机之间的通信。MCS-51和8251A的连接图见图3。
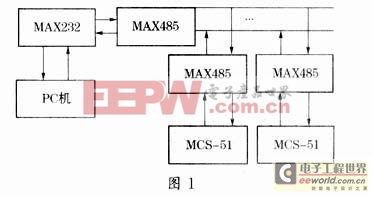
由于远距离数据传输,在系统中用了两片MAX485芯片进行数据传送,还采用了两级光电隔离来提高系统的抗干扰能力。单片机和PC机之间的RS-232通信硬件接口电路框图如图4所示。
3 串行通信的软件程序设计
3.1 主从式多机通信原理
MCS-51用于多机通信时必须工作在方式2或方式3。以方式3为例,每发送一帧数据为11位:1位起始位(0),8位数据位和1位停止位(1),附加的第9位数据在非多机系统中为奇偶校验位,在发送端有SCON的TB8产生,在接收端传送到SCON的RB8。它还可设定为“0”或“1”作为在多机通信中区分数据帧(0标志)还是地址帧(1标志)的标志。在MCS-51多机系统中有以下协议:所有的各从机均处于听命状态,即SM2=1,以便接收主机发来的地址,当接收到一帧信息的RB8为“1”时,表示主机发送来的是地址信息,所有的从机均发生接收中断,否则中断屏蔽。当一从机进入相应的中断服务程序,把接收到的地址和本机的地址比较,如果相符合就令其SM2=0,并向主机发回本机地址以作应答,该从机就与主机联通,准备接收主机发来的命令或数据信息,而其他的未被寻址从机保持SM2=1并退出各自的中断服务程序。这样,只有SM2=0的从机才能接收到主机发送来的数据信息,顺利实现地址帧和数据帧的分离。被寻址从机在通信完成后重新使SM2=1,并退出中断服务程序,等待下次通信。

3.2 多机通信协议
要实现单片机和PC机的正常通信,必须正确设定它们两者之间的通信方式,保证双方都用相同的波特率、起始位、停止位、奇偶校验位,并且要建立双方通信的应答信号。
单片机既可工作在同步移位寄存器方式下也可工作在UART(通用异步收发器)下。串行口的通信方式是由特殊功能寄存器SCON来控制的。其各控制定义如下:

SM0,SM1:工作模式设定位;SM2:允许使用方法2、3多机通信控制位;RB8:接收数据第9位;TB8:发送数据第9位;TI:发送中断标志;RI:接收中断标志。本文中工作方式为3,即9位UART定时器T1作为波特率发生器,工作在方式2,若选定波特率为1200bps,则计数初值为0E8H(SMOD=0,时钟频率Fosc为11.059MHz)。
PC机的异步通信接口为INTEL8251A,它可设定1位、1.5位或2位停止位,数据可在5~8位之间选择,通信频率为0~9.6Kbps,有奇偶校验、帧校验、溢出校验三种方式。可通过对它写入一定的方式控制字、命令控制字从而进行初始化。它与MCS-51的连接如前面所示,则它的数据口地址为0F0H,控制口地址为0F1H。它的工作状态寄存于其状态字寄存器中,可由MCS-51的CPU读取。通信协议如下:(1)串行通信波特率为1200bps;(2)帧格式为8位数据位,一位起始位,一位可编程的第9位(即发送和接收的地址/数据位的标志位),一位停止位;(3)主机和从机遵循主从原则,主机用呼叫方式选择从机,数据在主机和从机之间双向传递,各从机之间的相互通信需通过主机作为中介;(4)主从机之间还应传送一些供它们识别的命令和状态字,如以00H表示主机发送从机接收命令,以01H表示从机发送主机接收命令等。
3.3 通信程序设计思路及其实现
程序主要包括主机程序(由主机主程序和通信子程序组成)、从机主程序和其中断服务程序组成。主机程序主要完成对8251A的初始化以及主机与从机之间的通信,主机程序框图见图5。而从机主程序主要完成对串行口的初始化、波特率的设置(应与8251A的波特率一致),它的中断程序主要用来完成MCS-51单片机与PC机的数据通信。从机中断服务程序框图见图6。
- FPGA的DSP性能揭秘(06-16)
- 基于单片机通用引脚的软件UART设计(10-16)
- 分时操作系统思想在单片机中的具体应用 (10-30)
- 基于AT89C51+DSP的双CPU伺服运动控制器的研究(05-26)
- 关于RTX51 TINY的分析与探讨(05-30)
- 基于MC9S12DGl28单片机的智能寻迹车设计(04-03)