一种嵌入式运动控制器的实现
的干扰,在电机旋转时,所发出的信号会出现许多毛刺,直接接到FPGA中会引起误判断,所以三对信号经过差分电路转化为单路信号A、B、Z。差分电路由AM26LS32构成,该芯片功能与AM26LS31相反,该电路的功能是将输入的一对极性相反的编码器反馈信号转化为单极性的方波信号。A、B两路为正交编码脉冲,Z路每转产生一个低电平脉冲,用于回零时的精确定位。
2.4 数字量输入输出接口模块
考虑到系统的可扩展性和DSP的GPIO口的数量,此运动控制器在DSP与FPGA上分别设计8路,共16路数字量输入输出。运动控制器的所有数字量输入输出信号均采用光电隔离处理,并对每一路信号进行相应的数字滤波处理,以消除噪声信号。数字量输入通道可以根据用户的要求自定义用途,用于零点、限位信号的输入等;数字量输出通道用于各轴方向、脉冲信号的输出以及一些外部设备的启停控制等。3 系统软件设计
软件设计采用模块化设计方法,程序的总体结构采用以数据管理和位置速度控制为主,以I/O端口控制、逻辑控制、插补运算等为中断任务或子函数任务的形式。位置速度控制主要负责对实时运动状态的监控与调节;I/O端口控制主要负责扫描输入端口、设置输出端口等辅助性任务。
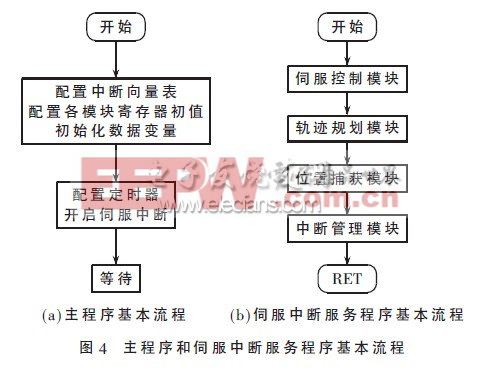
DSP控制程序主要由一个定时中断构成,主程序启动后,首先完成对TMS320F2812的初始化及系统的一些基本配置,并处于等待状态。运动控制功能是在伺服中断服务程序中实现的。主程序和伺服中断服务程序基本流程如图4所示。
FPGA主要完成运动控制器的精插补功能,采用数字积分法进行插补。把数字积分法分为3个状态:
(1)状态WAIT,等待插补信号;
(2)状态L1,判断总的脉冲数;
(3)状态L2,积分累加器累加一次,如有溢出,相应的输出脉冲为高电平,剩余累加次数减1。
数字积分法的有限状态机如图5所示。
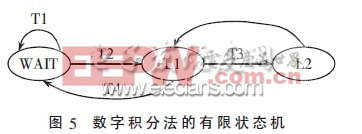
触发条件T1:没有启动信号,下一状态为WAIT,无操作;
触发条件T2:有启动信号,下一状态为L1,操作为初始化各寄存器,置忙信号;
触发条件T3:剩余累加次数大于0,下一状态为L2,操作为各轴输出脉冲为低电平;
触发条件T4:剩余累加次数为0,下一状态为WAIT,操作为各轴输出脉冲为低电平,清忙标志;
无触发条件:下一状态为L1。
具体实现方法为:时序电路产生的插补脉冲作为此模块的累加脉冲,每累加1次,剩余累加次数减1。当剩余累加次数为0时,此次插补过程结束。
4 结语
该运动控制器的结构设计可以模块化和易于扩展,这样可以满足用户的各种需求。在软件部分中,采用有限状态机的插补方法,在插补速度处理环节做了优化,使脉冲输出更加稳定。
- 3DES算法的FPGA高速实现(06-21)
- 基于DSP的Max-Log-MAP算法实现与优化(05-27)
- DSP中DMA操作的无阻塞请求实现(06-18)
- 二维DCT编码的DSP实现与优化(09-08)
- 基于DSP处理器上并行实现ATR算法(01-29)
- 基于DSP的H.324终端设计(05-27)