基于单片机的智能救援机器人小车设计
摘要:设计了一种简单的基于单片机的智能救援机器人小车,设计简单,易于实现,通过现场演示,我们的设计取得了不错的结果。
关键词:单片机;智能救援;机器人小车
0 引言
近几年地震灾害频频发生,危害较大的是2008年我国的汶川大地震和今年的日本大地震,期间全世界不知又有多少危害较小的地震,这些地震带给人们的是惨痛的伤亡和巨大的经济损失。我们不能够阻挡地震事件的发生,但我们能做的还有很多,其中对伤员的救援就是一项重要的工作。
当然,灾后环境错综复杂,这对救援工具的要求是一种挑战,同时对灾后生命的探测也是一个很重要的问题。基于这两点,我们设计了一种简易的智能救援机器人小车,通过现场演示,取得了不错的效果。
1 智能小车总体框架
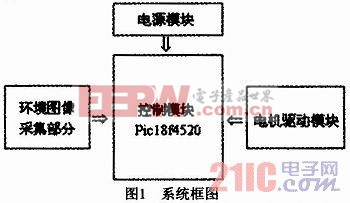
总体框架可以分为三大部分:环境图像采集部分、电机驱动部分和中央数据处理部分,系统框图如图1所示。
2 控制模块
智能救援小车最重要的部件,也就是它的大脑--中央处理系统。它不仅负责将环境图像采集部分送来的图像数据进行处理,还要将这些信息转化成为电机的驱动控制信号,使整车按照预定的规则前行,同时还要对其他一些辅助设备进行控制。这些一般单片机都可以实现,而对于行驶在错综复杂环境当中的救援小车来说,有一点很重要,那就是对外界的抗干扰能力要强,于是我们选择Microchip公司的8位微控制器PIC。该控制器除了刚才说的抗干扰能力强之外,还具有速度快、移植性好等优点。
3 电源模块
救援小车整体采用可充电蓄电池供电。由于微控制器、摄像头以及电机的工作电压是不同的,我们准备了两套解决方案:一是使用模拟电路进行稳压;二是使用专门的集成稳压芯片。通过实际操作以及比较,最终选择了第二种方案。其主要优点是:a.外围电路简单,只需简单的滤波即可;b.可提供稳定的输出电压;c.制作简单、成本低。供电系统框图如图2所示。

由于摄像头需要一个9~12V的电压才能正常工作,而充电电池的电压只有6~7.2V。所以DC-DC升压电路便成为必需。DC-DC电压变换采用MC34063A集成电路,该器件内部集成了温度补偿器、比较器、动态电流带限占空比可控的振荡器和一个高电流输出驱动器。
4 电机驱动模块
驱动机器人行走的两个电机需要不同的转速来实现转弯。选用的驱动芯片为L293D,它包含4个输出通道,最大输出峰值电流为12A,能同时驱动两个直流电机工作;其信号输入端和使能端接收到来自单片机的信号,控制电机的通断以及正、反转,还可以通过向使能端输入不
同占空比的方波信号来调整电机转速(PWM方式)。如图3所示,IN端口接控制信号,OUT端口接电机的两端,EN端口接使能信号。一组IN端口输入为高/低或低/高电平时,能实现电机的正/反转。一组IN端口输入均为高或低电平时,电机将停转。EN使能端为高电平时,相应端口输入信号有效;反之,则输入信号无效。在EN端输入PWM波,通过调整PWM波的占空比,即可实现电机的无级调速。

5 越障部分
越障无疑是这款智能救援机器人的突出特色。传统的救援机器人把重点都放在了如何救援,而忽略了路途的险恶,致使救援机器人有去无回。我们充分认识到这一点,在越障部分做了相当大的改进。三个车轮通过齿轮啮合组成一个大的车轮,当超声波模块检测障碍物时,整个大的车轮翻转,使其顺利越过障碍物,到达目的地,如图4所示。

6 现场采集部分
救援现场环境复杂,存在许多潜在危险,救援人员恐难进入,但救援人员又必须准确掌握现场的环境,为救援工作创造有利的条件。通过高清摄像头很好地解决了上述问题。为了实现多方位拍摄现场画面,使用舵机来控制它的旋转角度,减速电机控制它的升降。然后,画面通过无线视频传输模块发送到上位机界面上,以供救援人员参考。
7 生命探测模块
生命探测模块也是救援机器人不可或缺的部分,因为要想救援伤员,首先需要探测伤员的位置,这就需要生命探测模块了。
BISS0001是一款高性能的传感信号处理集成电路。静态电流极小,配以热释电红外传感器和少量外围元器件即可构成被动式的热释电红外传感器。原理图如图5所示。

8 结论
基于单片机,我们设计了一种简易机器人救援小车,通过现演示说明,我们的设计具有一定的价值和实用性。
- 十个中文例程教会你轻松上手制作Arduino智能小车(06-04)
- 技术控做的玩具就是酷,小车跷跷板平衡控制系统设计,完整解决方案(06-04)
- 经典款嵌入式智能小车的设计技巧,提供硬件选型(06-03)
- 13个基于STM32的经典项目设计实例,全套资料~(06-03)
- 轻松实现交互式机器人小车设计,提供软硬件设计指南(06-03)
- 51单片机循迹小车电机驱动程序PWM(12-02)