基于DSP的新型汉字NAVTEX系统接收机的设计
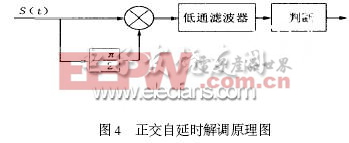
NAVEX系统的2FSK信号表达式为:
S ( t) = cos[ (ωc ±δw ) •t + φ] (1)
S ( t) 与其自延信号S ( t - τ) 的乘积为:
cos[2 •(ωc ±δw ) ] •t - (ωc ±δw ) •τ+ 2 •φ] +cos[ (ωc ±δw ) •τ] (2)
令τ满足ωc •τ = π/2 ,则(2) 式经低通滤波以后为: ±sin (δw*τ)
这样就可以根据滤波结果的符号判断发送信号的值:负号表示发送信号为0 ,正好表示发送信号为1。
由于τ是小数倍延时,所以还要通过一个单零点的FIR 滤波器来实现。滤波器的差分方程为:y ( n) = X ( n) + βX ( n - 1) ,β可以计算出来。
该信号的波特率为100Hz ,采样率为3 400Hz ,则在每一个波特率周期内的采样点数为34 。
设S ,DT1 是连续存储器位置变量,且令:
DT1 = cos[ (ωc ±δw ) •( n - 1) T + φ]
DT = cos[ (ωc ±δw ) •( n - α) T + φ]0 α 1
则有: DT = S + βDT1
2FSK解调算法的流程如图5 所示。
LPFOUT 低通滤波输出;
PJMX 包络检波器的判决门限;
SADAT 当前波特率周期内采样点的数据估计;
SADCT 当前波特率周期内采样点的计数;
BFDAT 前一个波特率周期的数据估计;
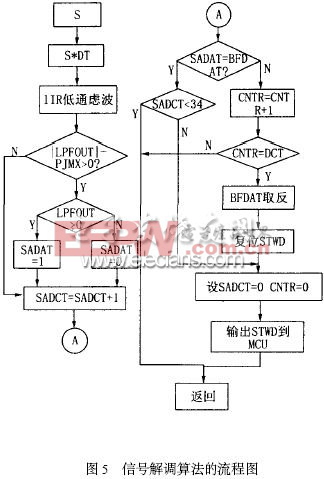
STWD DSP 送入MCU 的状态字;
DCT 设定的数据转变发生的条件;
CNTR 根据它的值判断是不是对BFDAT取反。
结论
本设计误码率10 - 3 以下,满足NAVTEX 系统技术指标的要求。在此设计的基础上还可增加多模无线电导航功能,使其同我国现有的Loran - C 导航系统、北斗导航系统构成全方位的无线导航系统。同时还可以利用软件化体系结构使其智能化的处理安全信息、导航信息,有了更大的灵活度。
系统 接收机 设计 NAVTEX 汉字 DSP 新型 基于 相关文章:
- Linux嵌入式系统开发平台选型探讨(11-09)
- VxWorks实时操作系统下MPC8260ATM驱动的实现(11-11)
- VXWORKS内核分析(11-11)
- Linux内核解读入门(11-09)
- linux文件系统基础(02-09)
- 基于Winodws CE的嵌入式网络监控系统的设计与实现(03-05)