基于单片机的两点间温度控制
以温度作为被控制量的反馈控制系统。在化工、石油、冶金等生产过程的物理过程和化学反应中,温度往往是一个很重要的量,需要准确地加以控制。除了这些部门之外,温度控制系统还广泛应用于其他领域,是用途很广的一类工业控制系统。温度控制系统常用来保持温度恒定或者使温度按照某种规定的程序变化。
严格说,多数温度控制系统中被控对象在进行热交换时的温度变化过程,既是一个时间过程,也是沿空间的一个传播过程,需要用偏微分方程来描述各点温度变化的规律。因此温度控制系统本质上是一个分布参数系统。分布参数系统的分析和设计理论还很不成熟,而且往往过于复杂而难于在工程实际问题中应用。解决的途径有二:一是把温度控制系统作为时滞系统来考虑。时滞较大时采用时滞补偿调节,以保证系统的稳定性。具有时滞是多数温度控制系统的特点之一。另一途径是采用分散控制方式,把分布参数的被控过程在空间上分段化,每一段过程可作为集中参数系统来控制,构成空间上分布的多站控制系统。采用分散控制常可获得较好的控制精度。
1. 实验任务
用可调电阻调节电压值作为模拟温度的输入量,当温度低于30℃时,发出长嘀报警声和光报警,当温度高于60℃时,发出短嘀报警声和光报警。测量的温度范围在0-99℃。
2.电路原理图
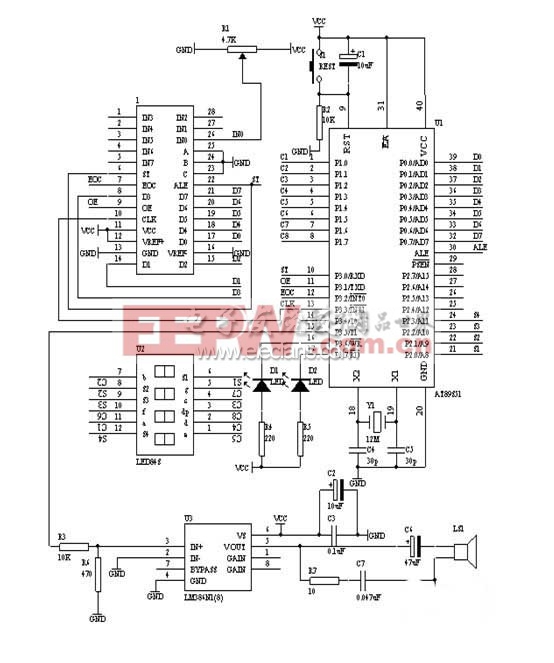
3. 系统板上硬件连线
a) 把单片机系统区域中的P1.0-P1.7与动态数码显示区域中的ABCDEFGH端口用8芯排线连接。
b) 把单片机系统区域中的P2.0-P2.7与动态数码显示区域中的S1S2S3S4S5S6S7S8端口用8芯排线连接。
c) 把单片机系统区域中的P3.0与模数转换模块区域中的ST端子用导线相连接。
d) 把单片机系统区域中的P3.1与模数转换模块区域中的OE端子用导线相连接。
e) 把单片机系统区域中的P3.2与模数转换模块区域中的EOC端子用导线相连接。
f) 把单片机系统区域中的P3.3与模数转换模块区域中的CLK端子用导线相连接。
g) 把模数转换模块区域中的A2A1A0端子用导线连接到电源模块区域中的GND端子上。
h) 把模数转换模块区域中的IN0端子用导线连接到三路可调电压模块区域中的VR1端子上。
i) 把单片机系统区域中的P0.0-P0.7用8芯排线连接到模数转换模块区域中的D0D1D2D3D4D5D6D7端子上。
j) 把单片机系统区域中的P3.6、P3.7用导线分别连接到八路发光二极管指示模块区域中的L1、L2上。
k) 把单片机系统区域中的P3.5用导线连接到音频放大模块区域中的SPK IN端口上。
l) 把音频放大模块区域中的SPK OUT插入音频喇叭。
4. 汇编源程序
(略)5.C语言源程序
#include AT89X52.H>
unsigned char code dispbitcode[]={0xfe,0xfd,0xfb,0xf7,
0xef,0xdf,0xbf,0x7f};
unsigned char code dispcode[]={0x3f,0x06,0x5b,0x4f,0x66,
0x6d,0x7d,0x07,0x7f,0x6f,0x00};
unsigned char dispbuf[8]={10,10,10,10,10,10,0,0};
unsigned char dispcount;
unsigned char getdata;
unsigned int temp;
unsigned char i;
sbit ST=P3^0;
sbit OE=P3^1;
sbit EOC=P3^2;
sbit CLK=P3^3;
sbit LED1=P3^6;
sbit LED2=P3^7;
sbit SPK=P3^5;
bit lowflag;
bit highflag;
unsigned int cnta;
unsigned int cntb;
bit alarmflag;
void main(void)
{
ST=0;
OE=0;
TMOD=0x12;
TH0=0x216;
TL0=0x216;
TH1=(65536-500)/256;
TL1=(65536-500)%256;
TR1=1;
TR0=1;
ET0=1;
ET1=1;
EA=1;
ST=1;
ST=0;
while(1)
{
if((lowflag==1) (highflag==0))
{
LED1=0;
LED2=1;
}
else if((highflag==1) (lowflag==0))
{
LED1=1;
LED2=0;
}
else
{
LED1=1;
LED2=1;
}
}
}
void t0(void) interrupt 1 using 0
{
CLK=~CLK;
}
void t1(void) interrupt 3 using 0
{
TH1=(65536-500)/256;
TL1=(65536-500)%256;
if(EOC==1)
{
OE=1;
getdata=P0;
OE=0;
temp=getdata*25;
temp=temp/64;
i=6;
dispbuf[0]=10;
dispbuf[1]=10;
dispbuf[2]=10;
dispbuf[3]=10;
dispbuf[4]=10;
dispbuf[5]=10;
dispbuf[6]=0;
dispbuf[7]=0;
while(temp/10)
{
dispbuf[i]=temp%10;
temp=temp/10;
i++;
}
dispbuf[i]=temp;
if(getdata77)
{
lowflag=1;
highflag=0;
}
else if(getdata>153)
{
lowflag=0;
highflag=1;
}
else
{
lowflag=0;
highflag=0;
}
ST=1;
ST=0;
}
P1=dispcode[dispbuf[dispcount]];
P2=dispbitcode[dispcount];
dispcount++;
if(dispcount==8)
{
dispcount=0;
}
if((lowflag==1) (highflag==0))
{
cnta++;
if(cnta==800)
{
cnta=0;
alarmflag=~alarmflag;
}
if(alarmflag==1)
{
SPK=~SPK;
}
}
else if((lowflag==0) (highflag==1))
{
cntb++;
if(cntb==400)
{
cntb=0;
alarmflag=~alarmflag;
}
if(alarmf
- 基于DSP的加速度计温度控制系统的硬件电路设计(07-13)
- 基于51单片机的两路温度控制器的设计方案(06-02)
- 硕人产品在温控器远程监控系统中的应用(12-20)
- 基于现场总线的智能仪表温度控制系统的设计(12-19)
- 易泰人机在多路温度控制领域的解决方案(12-19)
- LonWorks在反应罐自动温度控制系统中的应用(12-13)