CAN总线在家庭智能化控制系统中的研究与应用
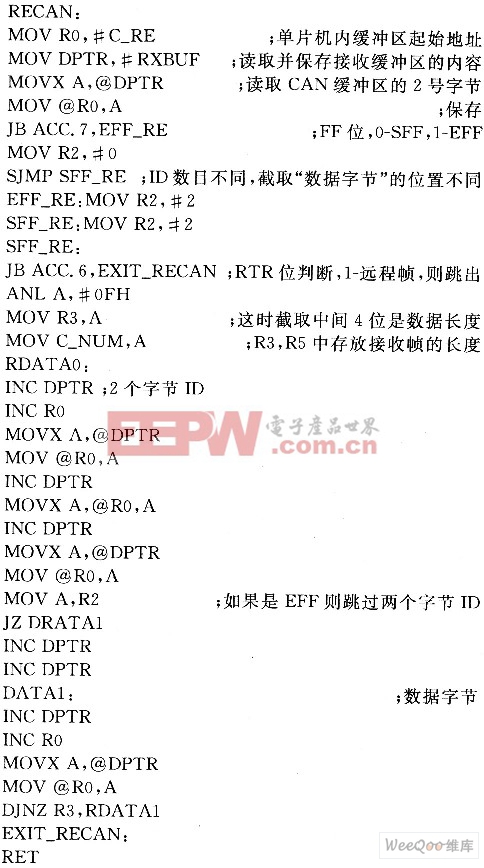
定时由3个互不重叠的段SYNC_SEG,TSEGl和TSEG2组成,这3个时间段分别是tSYNC_SEG,tTSEGl和tTSEG2。所以,额定位周期tbit是3个时间段的和:tbit=tSYNC_SEG+tTSEGl+tTSEG2。位周期中这些段都用整数个基本时间单位来表示。该时间单位叫时间份额TQ,时间份额的持续时间是CAN系统时钟的一个周期tSCL,可从振荡器时钟周期tCLK取得。通过编程预分频因数(波特率预设值BRP)可以调整CAN系统时钟,即tSCL=BRP×2tCLK=2BPR/CLK。 对CAN位定时计算的另一个很重要的时间段是同步跳转宽度(SJW),持续时间是tSJW。SJW段并不是位周期的一段,只是定义了在重同步事件中被增长或缩短的位周期的最大TQ数量。此外,CAN协议还允许用户指定位采样模式(SAM),分别是单次采样和三次采样模式(在3个采样结果中选出1个)。在单次采样模式中,采样点在TESG1段的末端。而三次采样模式比单次采样多取两个采样点,它们在TSEGl段末端的前面,之间相差一个TQ。上面所提到的BPR,SJW,SAM,TESGl,TESG2都可由用户通过CAN控制器的内装中寄存器BTR0和BTRl来定义。设置好BTR0和BTRl后,实际传输的波特率范围为:最大=1/(tbit-tSJW),最小=1/(tbit+tSJW)。 检测转换装置的串口波特率,首先可对主机的接收波特率(以9600 b/s为例)进行设定,并在终端发送一个特定的字符(以回车符为例),这样,主机根据接收到的字符信息就可以确定转换装置的通信波特率。回车符的ASCII值是0DH,在不同波特率下接收到的值如表1所列。 数据在两个串口之间的传输时,常常会出现丢失数据的现象。由于单片机缓冲区有限,如接收数据时缓冲区已满,那么此时继续发送来的数据就会丢失。而流控制能有效地解决该问题,当接收端数据处理不过来时,流控制系统就会发出“不再接收”的信号,而使发送端停止发送,直到收到“可以继续发送”的信号再发送数据。因此流控制可以控制数据传输的进程,防止数据丢失。常用的两种流控制是硬件流控制(包括RTS/CTS,DTR/CTS等)和软件流控制XON/XOFF(继续/停止),下面仅就硬件流控制RTS/CTS加以说明。 采用硬件进行流控制时,串口终端RTS,CTS接到单片机的I/O口,通过置I/O口为1或0来接收和发出起停信号。数据终端设备(如计算机)使用RTS来起始单片机发出的数据流,而单片机则用CTS来起动和暂停来自计算机的数据流。实现这种硬件握手方式时,在编程时根据接收端缓冲区的大小设置一个高位标志和一个低位标志,当缓冲区内数据量达到高位时,就在接收端将CTS线置低(送逻辑0),而当发送端的程序检测到CTS为低后,就停止发送数据,直到接收端缓冲区的数据量低于低位而将CTS置高为止。RTS则用来标明接收设备有没有准备好接收数据。 以下是CAN接收子程序: 3 结语 通过对家庭智能控制系统的分析,采用PLC与CAN总线构建成控制性局域网,通过仿真系统的测试,该总线完全能完成对家庭智能终端设备实行控制,但要使它控制的稳定性和实时性得到进一步提高,还需在此基础上作更加深入的研究。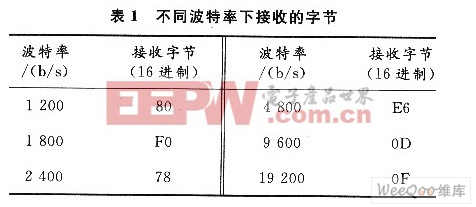

- 对TTCAN的分析(05-26)
- 嵌入式Win CE中CAN总线控制器的驱动设计与实现(05-01)
- μC/OS-II的多任务信息流与CAN总线驱动(07-11)
- 采用CAN总线实现DSP芯片程序的受控加载(11-08)
- 基于DSP的电动汽车CAN总线通讯技术设计(10-08)
- 基于DSP的CANopen通讯协议的实现(01-18)