基于DSP的永磁电机推进系统设计
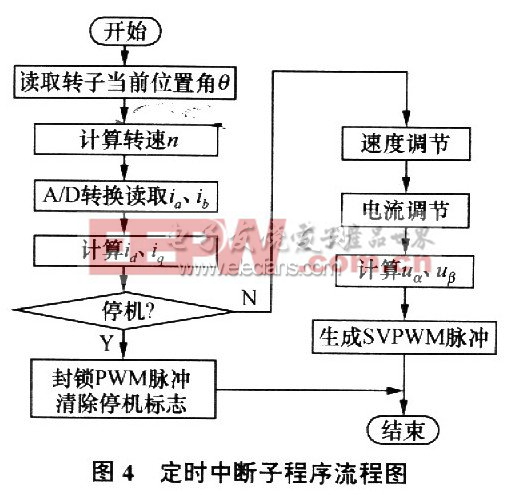
的工作模式和初始状态主程序负责收集电机电流、转速等一系列实时运行信息;定时中断子程序则是实现电机矢量控制策略的核心程序,主要完成PI调节和SVPWM波形发生这两大功能,其流程图如图4所示。
3.1 数字PI调节器
模拟PI调节器的控制规律为:

其中:e(t)为参考值与实际值之差,作为PI调节器的输入;u(t)为输出和被控对象的输入;uo为PI调节器的初值;Kp为比例系数;TI为积分常数。
将式(4)离散化,即可得到数字PI调节器的数学表达式:

式中:k为采样序号,T为PWM采样周期,KI=Kp/TI,为积分系数。
由于电机转轴和负载轴转动惯量的存在,速度PI调节器的时间常数较大,调速时系统响应较慢而电流PI调节器则因为电时间常数较小,在电机起动和大范围加减速时能够快速进行电流调节和限幅,增强了系统抗电源和负载扰动的能力。
3.2 SVPWM波形发生
SVPWM是一种从磁通角度出发的PWM方式,其基本原理及扇区划分见文利用EVA的全比较单元,可直接在PWMl~6引脚上输出五段式SVPWM波形,它在每个PWM周期中,能够保证一相的开关状态不变,有利于开关损耗的减小其主要步骤如下:
1)将比较控制寄存器(COMCONA)第12位置l,使SVPWM发生功能有效;
2)设置比较方式控制寄存器(ACTRA),令SVPWM输出矢量正向旋转,使PWMl、3、5引脚高有效,PWM2、4、6引脚低有效;
3)设置定时器TI计数方式为连续增/减,相应周期寄存器TIPR的初始值为PWM采样周期的一半,即Tc/2;
4)计算输出空间电压矢量Uout在两相静止坐标系中的分量uα、iβ;
5)确定组成Uout所在扇区的两个非零空间矢量Ur、Ux+60按其值装配ACTRA;
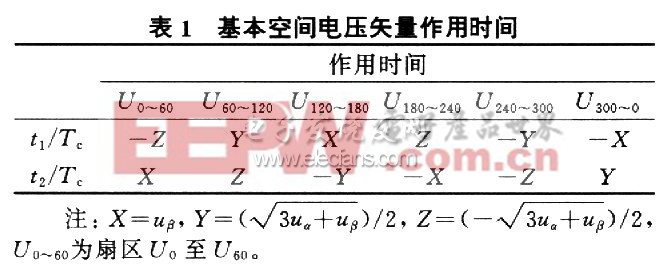
6)根据表1计算Ux、Ux+60的作用时间t1、t2,将t1装入比较寄存器CMPRlt1+t2装入CMPR2,启动定时器操作。
当TI值与CMPRl或CMPR2值发生匹配时,PWM输出就会产生跳变通过及时更新每个采样周期中CMPRl、CMPR2的值,就可以形成一系列不等宽的脉冲,使输出电压矢量的磁链轨迹为圆形,为避免IPM同一桥臂上下两只IGBT的直通,程序通过死区控制寄存器对PWMl~6引脚设置死区时间;同时滤除PWM序列中的过窄脉冲,以减小器件的开关损耗。
4 仿真与实验结果
本文利用Matlab/Simulink工具箱,根据图1搭建系统模型,对一台3对极永磁同步电机进行了矢量控制策略的仿真,所得仿真波形如图5所示。
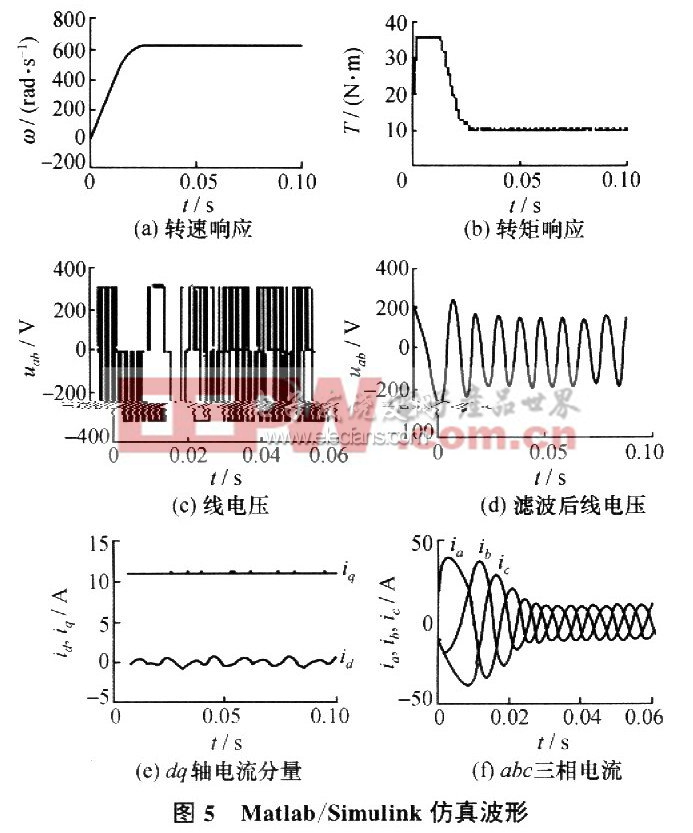
从仿真结果可以看出,本矢量控制系统响应快速,转矩脉动小,动态性能良好;id能够较好地跟随参考值0,从而保证了单位电流下最大转矩的输出,有利于推进电机效率的提高。
实际实验中,TMS320LF2407A时钟频率为30 MHz,SVPWM采样频率为3 kHz,死区时间设为8 μs,并滤除正负脉宽小于6%脉冲周期的过窄脉冲当转速为300 r/min时,可得永磁电机推进系统输出电压、电流波形及其频谱如图6、图7所示。
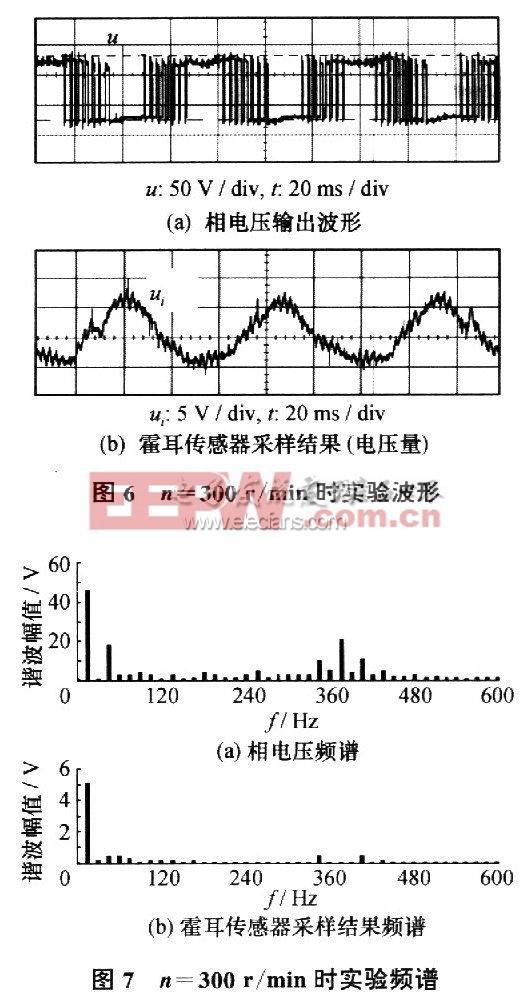
由图7a可看出,SVPWM方式生成的电压基波幅值较大,谐波分布比较分散,其低次谐波主要为三次谐波;由图7b可以看出,三相电机的电路结构对三次谐波成分有自然抑制作用,高次谐波则通过电机绕组电感的滤波作用得到削弱和消除,从而大大减小了谐波电流。
5 结 论
仿真与实验结果表明,采用交-直-交PWM驱动和最大转矩/电流矢量控制的全数字永磁同步电动机推进系统,电压利用率较高,转矩脉动小,能够较好地抑制了电机电流中的谐波,低速性能优于直接转矩控制,满足推进电动机低转速、大转矩、轻噪声的要求,为现代舰船电力推进系统数字化操控的实现提供了一定参考。
- Linux嵌入式系统开发平台选型探讨(11-09)
- VxWorks实时操作系统下MPC8260ATM驱动的实现(11-11)
- VXWORKS内核分析(11-11)
- Linux内核解读入门(11-09)
- linux文件系统基础(02-09)
- 基于Winodws CE的嵌入式网络监控系统的设计与实现(03-05)