一种自动割草机器人的设计和实现
障开关检测不到的盲区障碍物和快速移动物体,是一种被动的避障方式。碰撞开关的原理是在割草机被外物碰撞到前方的一个机械的弹簧结构后,会让一个触点短路,这样能给单片机一个低电平信号,通知单片机遇到了障碍物,单片机就会执行相应的避障措施。
2.3.4 雨水传感器
雨水传感器由一个湿敏电阻和一个比较器组成。在正常工作情况下,湿敏电阻阻值为1 MΩ左右,这样可使比较器输出为高(正极电压(约2.5 V)大于负极电压(约2 V))。如果有雨水碰到湿敏电阻,则电阻的阻值会急剧下降到1 kΩ左右,比较器输出就为低(正极电压(约0 V)小于负极(约2 V))。这样就能使单片机得到雨水感应信号,执行回基站避雨的操作。图4为雨水传感器电路图。

2.3.5 光电开关避障
光电避障是最主要的避障方式,也是一种主动的避障方式。优点是不用碰到障碍物就可以检测到并且躲开,避免直接碰撞到障碍物。光电开关可检测的距离可以根据实际控制的需要进行调节。
2.3.6 传感器在车体位置上的排布
多传感器系统传感器的位置和排布对于控制精度有很大影响,在借鉴了其他多传感器系统的排布后,设计出本系统的传感器排布图[2],如图5所示。

A1、A2、A3、A4都是电子篱笆探头的放置位置。B1和B2是光电传感器和碰撞开关的安装位置,尽量放在边缘有利于检测障碍物减小检测的盲区。其中,A3、A4这两个电子篱笆探头主要用于检测前端电子篱笆区域,如果检测到,执行后退再转向的动作。A1、A2则是用于进入基站时的寻线,因为进入基站的任务是通过首先寻找到边界的电子篱笆线,然后再切入电子篱笆线中,最后通过寻线的方式一直走入基站。A1、A2也可以在自动割草时发挥作用,避免割草机走出边界,特别是在割草区域的边角地带,成为处理边界算法中的一个重要辅助信号。
2.4 其他部分
其他部分包括过电流保护、欠电压保护。过电流保护主要保护割草机驱动电路不会因为堵转、割刀卡死等原因损坏;欠电压保护通过检测电池电压来确定是否应该回基站充电,实现自动充电的功能。
3 软件系统设计
自动割草机器人的软件部分使用单片机C语言编程设计[3],根据实际的控制要求实现自动割草机器人的功能。软件部分尽量使用查询代替中断,增加了软件的健壮性。割草路径的规划是自动割草机器人的主要算法部分。
3.1 软件总体结构
主程序主要执行初始化以及自动割草机器人的3种行走策略:普通行走的任务;回到基站的任务;执行出站的任务。在外部中断中,外部光电避障、碰撞开关避障和保护部分的信号是主要外部中断的来源,用于实时响应这些异常事件。软件流程图如图6.

3.2 割草路径规划
路径规划是指,在具有障碍物的环境中,按照一定的评价标准,寻找一条从起始状态到目标状态的无碰撞路径。本算法中路径规划采用了基于知识的遗传算法,它包含了自然选择和进化的思想,具有很强鲁棒性。机器人整体的运动规划一般又称为路径规划,由于机器人整体看作是一个点或者是一个固定的几何体,自由度比较少,因此路径规划问题相对比较简单。传统的机器人运动规划算法已经能较好地解决路径规划问题。
自动割草机器人路径规划的遍历策略是割草机设计中的一个重要环节,涉及到割草机割草的效率。合理的遍历策略可以使自动割草机器人在最短的时间内遍历整个割草区域[4].常用的割草策略主要有两种方式:直线运行方式和边界跟踪运行方式[5].两种覆盖区域方式如图7、图8所示。
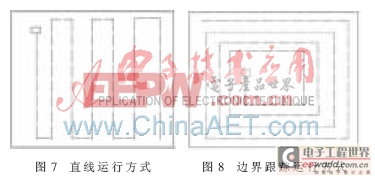
采用直线运行时,转向处会有不可避免的重叠路径,使总的运行距离增加;采用边界跟踪的方式时,需要机器人不断地调整进行方向,容易带来误差。针对自动割草机器人以单片机为核心的控制器而言,需要自动割草机器人的运行轨迹尽量简单化和规范化。因此采取直线运行方式遍历子区间,在前向的电子篱笆传感器感应到边界后,割草机器人后退一小段距离,然后以一个轮子为中心,另一个轮子左转(或右转)180°,完成掉头,然后继续前进,下次再碰到边界就向相反的方向旋转180°,这样就可以做到区域的覆盖。
3.3 割草边界区域的处理方法
割草机器人在区域的边角处行走是最容易出现问题的时候,不合理的行走策略可能导致割草机器人走出边界。所以要利用割草机器人现有的传感器去选择在区域边角的运行策略。
经过实验发现,出现越界问题的情况主要有两种。
(1)割草机到达边界的一个角落,如图9.在这种情况下割草机器人传感器A4(或者A3)首先检测到边界L1的信息,根据直线运行方式就应该先后退再向左转(或向右转)。正常情况下走到这种角落时就应该是先检测到L1,然后后退一段距离,再向右方向转
自动割草机器人 相关文章:
- Windows CE 进程、线程和内存管理(11-09)
- RedHatLinux新手入门教程(5)(11-12)
- uClinux介绍(11-09)
- openwebmailV1.60安装教学(11-12)
- Linux嵌入式系统开发平台选型探讨(11-09)
- Windows CE 进程、线程和内存管理(二)(11-09)